Willkommen im KI-Labor
Lehre und Forschung auf den Gebieten
-
Wissensverarbeitung und Methoden der Künstlichen Intelligenz
-
Soft Computing, Fuzzy Systeme, Neuronale Netze, Artificial Life
-
Evolutionäre Algorithmen, Zeitlogik, Bayessche Netze
-
KI-Programmiersprachen LISP und PROLOG
-
Semantische Signalanalyse
Anwendung wissensbasierter Systeme
-
Integrierte Informatikanwendungen, Autonome Mobile Systeme,
-
Planung und Optimierung, Entscheidungsunterstützung, Data Mining
Studienrichtung
"Intelligente Systeme" im Informatikstudium
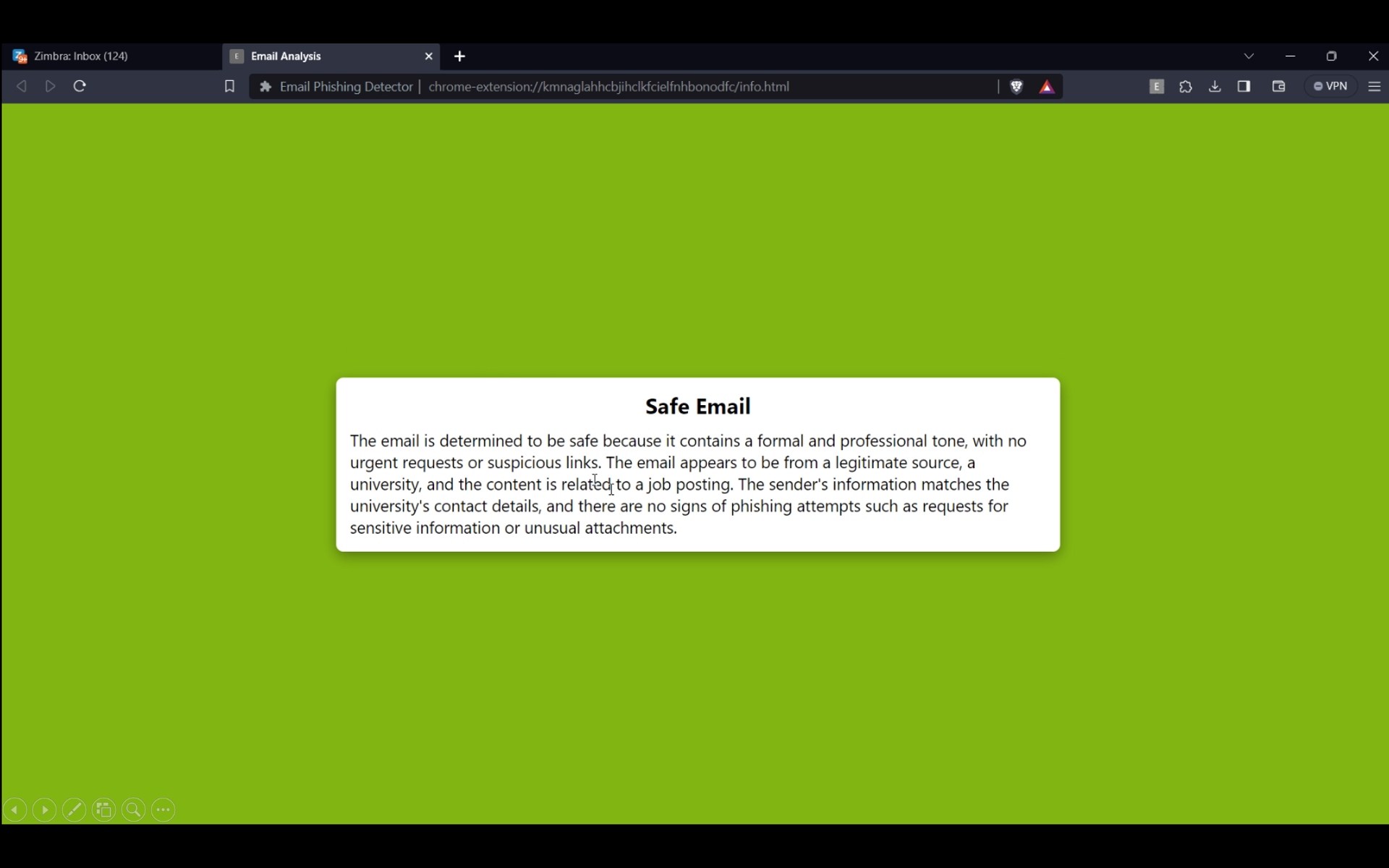
LLMs zur Detektion von Phishing-Emails
Im Rahmen des Masterprojekts "Künstliche Intelligenz - ChatGPT
in AKtion" im WS23/24 wurde von drei Erasmus-Studierenden ein
Prototyp für einen Email-Checker entwickelt, der mit Hilfe
eines Sprachmodells eine Email in Zimbra mit einem Chrome-Plugin
auf Anzeichen von Phishing überprüft
Das Prinzip besteht darin, dass der Emailtext mit einem
speziell entwickelten Prompt, der teilweise durch einen genetischen
Algorithmus optimiert wurde, mit GPT-3.5 klassifiziert wird.
Dabei berücksichtigt GPT bestimmte psychologische Aspekte [SMG22]
und kann bei Bedarf auch erklären, warum die Email
als...
mehr lesen ...
Mittwoch, Januar 17, 2024
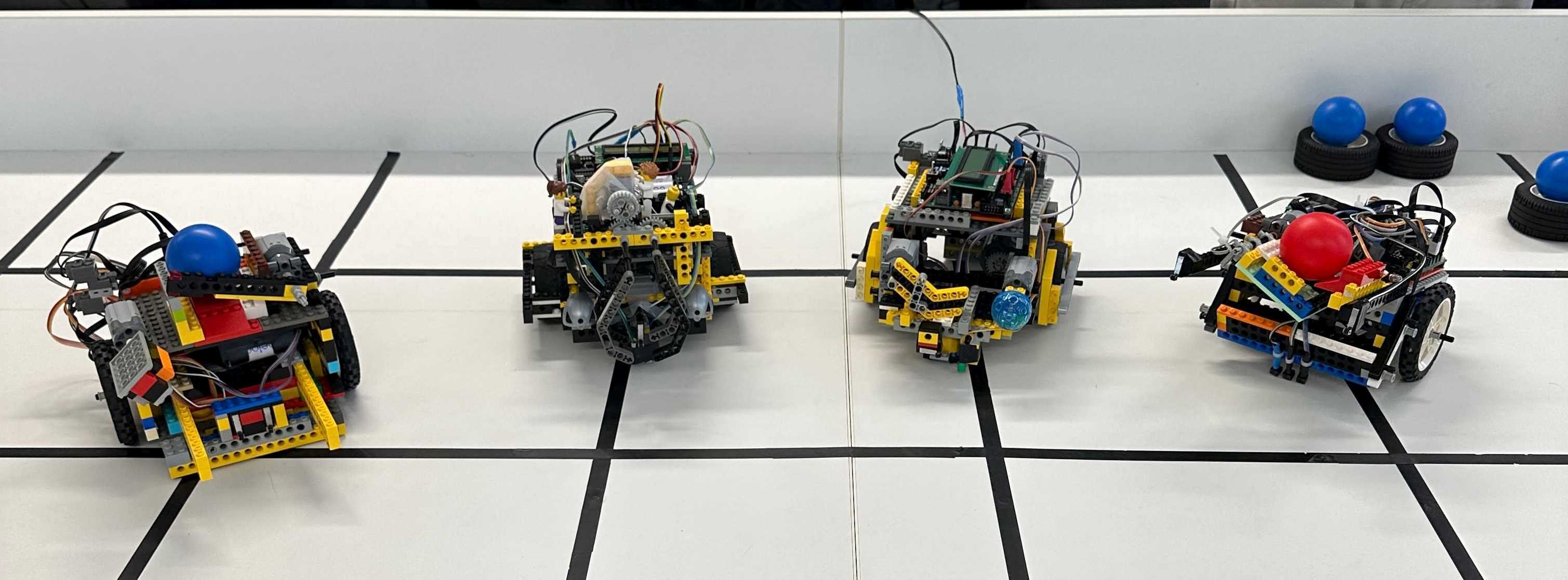
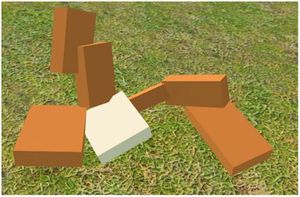
Pizzabote 2024 - Breitensuche praktisch
In diesem Bachelorprojekt geht es um die Konstruktion und
Programmierung eines Roboters, der Pizzas einzeln an Kunden
ausliefert. Die Welt ist formalisiert, nicht wirklich essbar und
dennoch real und physisch:
"Ihr Roboter erhält den Auftrag, eine oder mehrere Pizzen
auszuliefern. Das Streckennetz ist ein einfaches Gitter, in dem es
jedoch zu Störungen und damit zu unpassierbaren Kreuzungen kommen
kann. Die gute Nachricht ist, dass Sie über globales Wissen
verfügen und die aktuelle Karte der befahrbaren Wege dem Roboter
kurz vor dem Start zur Verfügung...
mehr lesen ...
Mittwoch, Oktober 04, 2023
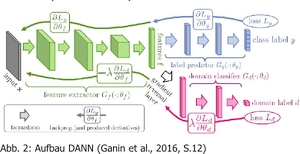
Domain-Adversarial Training neuronaler Netze zur Überbrückung
von Domänenlücken und Vergleich mit Contrastive Learning in einer
industriellen Anwendung
Die Arbeit im realen industriellen Kontext konzentriert sich auf
die Implementierung des Domain-Adversarial Trainings neuronaler
Netze (DANN) zur Überbrückung einer Domänenlücke zwischen
verschiedenen Kameratypen, speziell Industriekameras und
Smartphone-Kameras. Ziel der Arbeit ist es, ein Regressionsmodell
zu trainieren und dieses gegen einen anderen Ansatz zu evaluieren,
der Contrastive Learning for Unpaired Image-to-Image Translation
(CUT) verwendet.
Die Trainingsdaten bestehen aus vorverarbeiteten Bildern von
Laserschnittkanten. Um die Untersuchungen möglichst praxisnah zu
gestalten, wird die Anzahl der verwendeten gelabelten...
mehr lesen ...
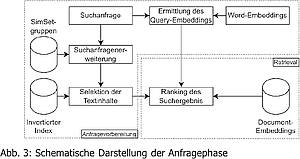
Evaluation eines Word-Embedding-basierten
Information-Retrieval-Systems
Die Arbeit konzentriert sich auf die Evaluation eines
Word-Embedding-basierten Information-Retrieval-Systems, das von der
Fraunhofer-Gesellschaft zum Patent angemeldet wurde. Ein besonderes
Merkmal des IR-Systems ist die Verwendung von "SimSets" als
zentrale Datenstruktur, die dazu dient, die Zeit für die Ermittlung
der Suchergebnisse zu minimieren. Die Arbeit vergleicht dieses
System mit einer Volltextsuche und einer durch einen
domänenspezifischen Thesaurus erweiterten Volltextsuche, um deren
Effektivität zu bewerten.
In der Arbeit werden drei verschiedene Evaluationsmethoden
vorgestellt: Online-Evaluation, Interactive-Evaluation und die
Testdatensatz-basierte Evaluation, die dann für die Untersuchung
verwendet wird.
Die...
mehr lesen ...
Donnerstag, März 30, 2023
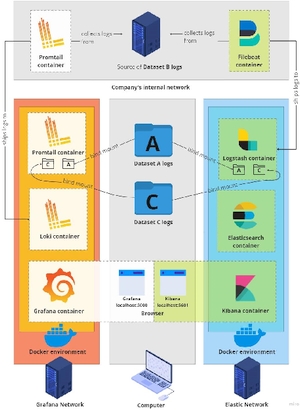
A Comparison of the Elastic Stack and Grafana Stack as Tools
for Analysing Log Data
Diese Arbeit analysiert zwei Gruppen von Open-Source-Software
für Log-Management und Log-Analyse: den Elastic Stack und den
Grafana Stack. Jeder Stack besteht aus einem Log-Aggregator, einer
Suchmaschine, die auch als Datenspeicher dient, und einer
Browser-Schnittstelle. Das Ziel der Arbeit ist der Vergleich der
beiden Log-Management-Stacks in einer ressourcenbeschränkten
Umgebung. Hierbei sollen typische Anwendungsdaten ausgewählt und
die Stacks beim Einlesen und Abfragen bezüglich der
Ressourcennutzung und Abfrageleistung evaluiert werden. Zusätzlich
soll ein Überblick über die Funktionalität der Stacks hinsichtlich
der geplanten...
mehr lesen ...
Generieren von Navigationsnetzwerken für GeoJSON Innenraum
Karten zur Optimierung der ServiceNow Indoor-Mapping
Applikation
Diese Arbeit befasst sich mit dem Entwurf und der
Implementierung eines Algorithmus zur Erzeugung von
Indoor-Navigationsnetzwerken aus Gebäudekarten. Die Netze sind
Straßenkarten und sollen zur Navigation von Fußgängern im Gebäude
dienen. Dazu sind die Anforderungen zu definieren, die
theoretischen Grundlagen der algorithmischen Geometrie
darzustellen, Algorithmen auszuwählen und zu evaluieren.
Der ausgewählte Algorithmus soll in der Anwendung des
Unternehmens implementiert und evaluiert werden. Die besonderen
Schwierigkeiten ergeben sich aus der Integration in eine reale
Anwendung und der Einarbeitung in ein...
mehr lesen ...
Donnerstag, Januar 26, 2023
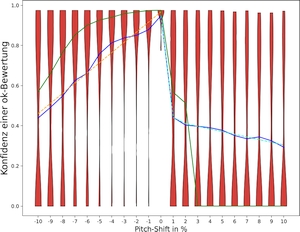
Sensitivitätsanalyse eines neuronalen Netzes mit Hilfe einer
systematischen Teststrategie zur Bestimmung von Grenzfällen
Ein akustikbasiertes Prüfsystem für Steckverbindungen soll auf
akustische Einflussfaktoren untersucht werden, um es prozessfähig
zu integrieren. In der Vergangenheit wurden einzelne Aspekte der
Realumgebung durch Feldtests betrachtet, um das System abzusichern.
Ziel dieser Arbeit ist es, eine systematische Teststrategie zur
Simulation von Störfaktoren auf das KI-System zu entwickeln,
anzuwenden und eine Analyse basierend auf berechneten Ergebnissen
durchzuführen, um das Bewertungsverhalten des Systems zu ermitteln
und vorhersehbar zu machen.
Die systematische Teststrategie beinhaltet die Modifikation von
Eingabedaten für das KI-System...
mehr lesen ...
Freitag, Oktober 07, 2022
Systematischer Review zum Stand der Forschung bei der Erkennung
von Gebärdensprache
Die Aufgabe besteht darin, einen systematischen Review über die
Erkennung von Gebärdensprachen durchzuführen, um einen Überblick
über die vorhandenen Gebärdensprachenerkennungstechnologien zu
geben. Die Forschungsfrage lautet: "Welche Anwendungen mit welchen
Bedingungen weisen die visuellen Gebärdensprachenerkennungen auf?"
Die Arbeit konzentriert sich auf Technologien, die Kameras
verwenden, um Gebärden zu erfassen, und zielt darauf ab, praktisch
umsetzbare Anwendungen herauszuarbeiten und deren
Umsetzungsvoraussetzungen zu definieren.
Die Literatur wird mithilfe von Suchmaschinen und dem
booleschen Suchverfahren gesucht. Die Auswahl der Literatur erfolgt
anhand von festgelegten Ein-,...
mehr lesen ...
Donnerstag, Oktober 06, 2022
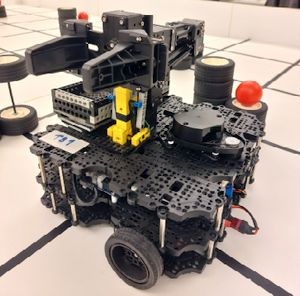
Entwicklung eines Demonstrators im Szenario eines mobilen
Pflückroboters auf Basis eines TurtleBots und OpenMANIPULATORs
Diese Arbeit befasst sich mit der Entwicklung eines
Demonstrators für einen mobilen Pflückroboter im Rahmen der
Einführung von ROS 2 im Labor für Künstliche Intelligenz.
Hierzu gehören der Hardwareaufbau und insbesondere die
Konzeption, Umsetzung und Evaluation einer geeigneten
Software-Architektur in ROS 2. Die besondere Schwierigkeit der
Arbeit besteht in der notwendigen Erschließung von Anwendungswissen
zu ROS 2 und der Lösung vielfältiger Probleme realer Robotik. Das
Szenario ist sinnvoll und ausreichend komplex zu definieren und mit
seinen...
mehr lesen ...
Dienstag, September 13, 2022
Modellierung und Simulation biologischer Bewegungsapparate zur
Veranschaulichung von Evolutionseffekten in einem künstlichen
Ökosystem mit Unreal Engine
Ziel der Arbeit ist die Entwicklung eines künstlichen
Bewegungsapparates für virtuelle Kreaturen (sog. „Swimbots“),
welches aufbauend auf dem KipEvo-Projekt in einer in Unreal Engine
implementierten Simulationsumgebung der Evolution unterzogen
werden. Die Wirksamkeit der Swimbots wird durch
Experimentdurchläufe untersucht und diskutiert.
Konzept
Die Swimbots werden als Mehrkörpersystem mit mehreren
kinematischen Ketten modelliert. Die Drehmomente der Gelenke werden
durch ein neuronales Netz berechnet, das auf vielfältige
Eingangsreize aus externen und Propriozeptoren reagiert. Die
ausgabe...
mehr lesen ...
Funktionsweise und Evaluation der adaptiven probabilistischen
Lokalisierung AMCL in NAV2
Diese Arbeit befasst sich mit der Inbetriebnahme eines
Turtlebot3-Roboters und der Evaluation eines Moduls der
Navigationskomponente NAV2 im Gesamtsystem ROS2/Foxy. Das Modul ist
die Lokalisierungskomponente AMCL, das in Open Source einen
adaptiven Partikelfilter realisiert. Der Quelltext der zu
evaluierenden Komponente liegt also vor und kann zur Einsichtnahme,
ggf. sogar durch eigenes Kompilieren herangezogen werden.
Die Arbeit liefert eine eingehende Beschreibung der
Funktionsweise und Einbettung von AMCL sowie eine Beurteilung der
Leistungsfähigkeit anhand von Experimenten im Simulator Gazebo als
auch mit...
mehr lesen ...
| 2022 FLL Challenge und FLL
Explore an der THB entfällt |
Wir haben wirklich lange und intensiv diskutiert. Auf der
einen Seite hängen wir natürlich sehr an der FIRST LEGO League, die
wir ja von Beginn an 20 Jahre intensiv und aktiv begleitet haben.
Auf der anderen Seite kostet uns das viel Zeit und Aufwand, den wir
in diesen ohnehin nicht gerade aufwandsarmen Zeiten stemmen
müssten.
Wir haben uns daher dazu durchgerungen, zumindest in dieser
Saison nicht dabei zu sein.
...
mehr lesen ...
Donnerstag, Februar 24, 2022
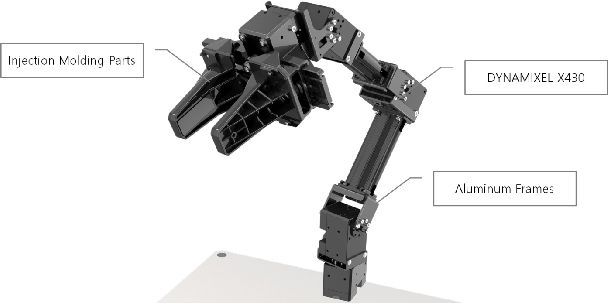
Inbetriebnahme des OpenMANIPULATOR-X und Handlungsplanung mit
Partial Order Planning Forward
Im Rahmen dieser Bachelorarbeit wird der Greifarm
OpenManipulator-X der Firma ROBOTIS in Betrieb genommen. Der
OpenMANIPULATOR-X ist ein Greifarm der Firma ROBOTIS, der mit dem
Robot Operating System 2 (ROS2) betrieben wird. Für diese Arbeit
wird er auf einer stationären Basisplatte montiert. Alternativ
besteht die Möglichkeit ihn auf dem mobilen Roboter TurtleBot3
WafflePi zu montieren.
Es werden ein Überblick über die grundsätzlichen Vorgänge und
Prozesse bei dessen Nutzung gegeben sowie die Möglichkeiten der
Steuerung erprobt. Weiterhin wird die Steuerung mittels...
mehr lesen ...
Donnerstag, Februar 10, 2022
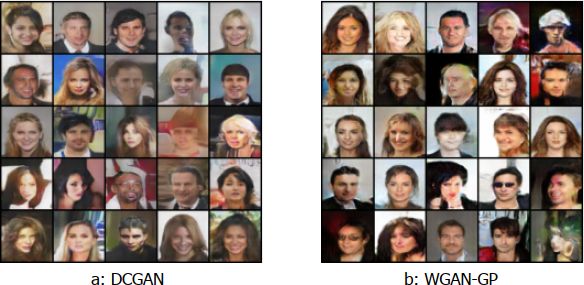
Umsetzung und Vergleich von GANs (Generative Adversarial
Networks) zur Generierung von Bildern menschlicher Gesichter
Generative Adversarial Networks (GANs) sind ein aktueller
Ansatz im Bereich der Deep Neural Networks. Diese Netzwerke sind in
der Lage anhand von hochdimensionalen Trainingsdaten (speziell
Bildern) die Verteilung der Daten zu erlernen und erfolgreich
Generatoren für diese Verteilung hervorzubringen. Das Ziel dieser
Arbeit besteht in der Auswahl, Implementierung und Evaluation
moderner GANs zur Synthese von Bildern menschlicher Gesichter. Die
besondere Schwierigkeit besteht in der Erschließung und Komplexität
der theoretischen Grundlagen, einer korrekten Implementierung und
insbesondere in der Auswahl...
mehr lesen ...
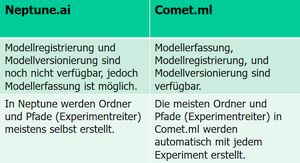
Frameworks zum Management von Data Science-Experimenten
Das Ziel dieser Bachelorarbeit liegt in der Gegenüberstellung
von mindestens zwei Frameworks zum Management von Data
Science-Experimenten. Hierbei ist der Bedarf, die Szenarien, die
Einsatzbereiche und funktionalen Angebote derartiger Frameworks
theoretisch zu erarbeiten und an einem konkreten Beispiel
(mindestens Klassifikation mit Hyperparameteroptimierung) mit Blick
auf die Nutzung in einem KMU zu evaluieren.
Eine wichtige nichtfunktionale Anforderung ist die
Verständlichkeit, Nachvollziehbarkeit und Wiederholbarkeit der
Arbeit.
In der Arbeit werden die Frameworks Neptune.ai und Comet.ml
gegenübergestellt. Nach den theoretischen Grundlagen zu MLP, CNN
und...
mehr lesen ...
Dienstag, Januar 18, 2022
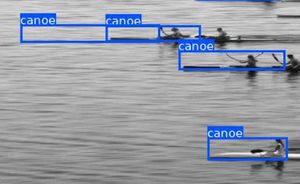
Reimplementierung einer Objekterkennung im Kanurennsport durch
ein aktuelles Convolutional Neural Network und Vergleich mit den
Vorgängerversionen
Ziel der Arbeit sind Deep Learning-Methoden aus dem Stand der
Forschung und ihre Implementierungen zur Detektion von Kanus und
Ruderbooten in Zeilenkamera-Bildern. Hierzu sollen geeignete
Ansätze identifiziert, exemplarisch auf dem Deep Learning-Server
des Fachbereiches mit den Kanudaten trainiert, evaluiert und mit
den im Einsatz befindlichen Netzversionen verglichen werden. Eine
Detektion auf der Zielplattform Jetson Nano ist optional, sollte
aber berücksichtigt werden.
Schwerpunkte sind die Darstellung der Funktionsweise eines
sinnvoll gewählten Modells, des Vorgehens beim...
mehr lesen ...
Donnerstag, Januar 13, 2022
Pizzabote 2022
Das Unternehmen Nuro.ai (Kalifornien) entwickelt ein kleines
vollautomatisches Lieferfahrzeug und erhält im Jahr 2019 eine
Finanzspritze von 940 Millionen Dollar. Geldgeber ist der
Investmentfonds des japanischen Technologiekonzerns Softbank. Es
folgt eine Kooperation mit Domino’s Pizza: "Once an order is ready
to be delivered from a participating location, Domino’s employees
will load it into one of several compartments in Nuro’s thin, stout
R1, which packs a proprietary combo of laser sensors, cameras, and
computers. The vehicles top out at 25 miles per hour and are fully
driverless ...".
Ist das schon SAE-Level 4?...
mehr lesen ...
Freitag, Dezember 10, 2021
| 2021 FLL Challenge und FLL
Explore - CARGO CONNECT |
Das FLL-Saisonthema lautet "CARGO CONNECT": In dieser Saison
sollt ihr neue Wege finden, um Menschen und Güter rund um die Welt
zu bringen und Innovationen im Bereich des Transports finden.
Heute, in unserer globalen Gesellschaft, verbessern wir unsere
Lebensqualität immer weiter, indem der Austausch von Waren und
Dienstleistungen schneller, sicherer und effizienter wird und wir
bessere Möglichkeiten entwickeln, um selbst auf Entdeckungsreisen
zu gehen. Ihr stellt euch den Herausforderungen des Transportwesens
und untersucht technische Fortschritte und...
mehr lesen ...
Donnerstag, Dezember 02, 2021
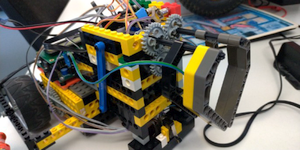
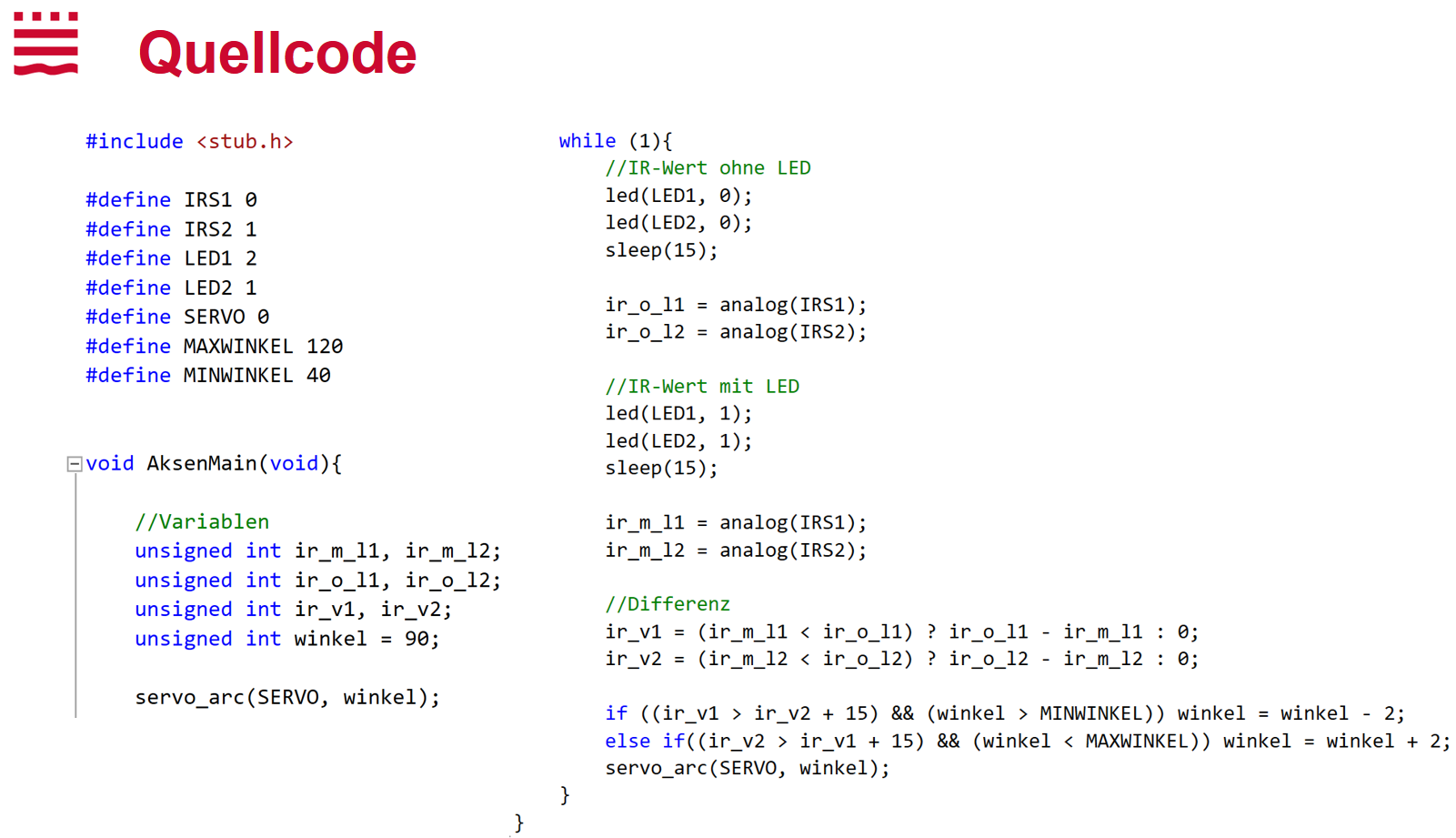
Das PST-Thema im KI-Labor: "Kleine Aufgaben sollen durch die
Konstruktion und Programmierung einfacher Maschinen gelöst
werden."
- Kleine Aufgaben? Es werden C-Programme (max 100 Zeilen)
mit Datentypen und Kontrollstrukturen benötigt. Sie lernen im
Projekt, diese zu schreiben.
- Maschinen?! Die Ausführung der Programme erfolgt auf
kleinen Maschinen, die Sie selbst aus Sensoren, Motoren und
Sensoren konstruieren.
Ergebnisse
Das Projekt "C und LEGO" belegte bei den Präsentationen den
2. Platz in der Gesamtwertung.
Hier einige Videos der Maschinen:
...
mehr lesen ...
Dienstag, November 30, 2021
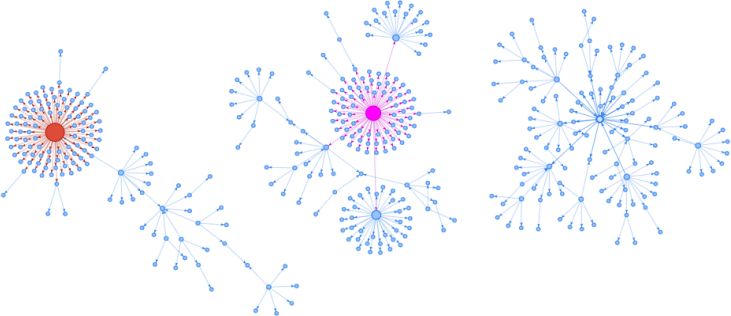
Netzwerkanalyse und Visualisierung der Nutzer und
3D-Druckvorlagen von thingiverse.com mit dem Ziel der
Lead-User-Identifizierung
Auf der Seite thingiverse.com können Nutzer
Open-Source-Lizensierte 3D-Druckvorlagen hochladen, zum Benutzen
herunterladen und verändern. Daraus lässt sich ein Netzwerk mit
verschiedenen Knotentypen konstruieren:
- Nutzer, die sich gegenseitig folgen, Druckvorlagen einstellen,
nutzen und verändern.
- Die Druckvorlagen (Designs) samt Versionsmanagement. Weiterhin
können Nutzer Vorlagen "liken".
- Beiträge zum Druck einer Vorlage (Makes), die mit einem Nutzer
und einer Vorlage verbunden sind, aber auch Informationen zum
Drucker, Material, Problemen beim Drucken und dem anschließenden
Gebrauch...
mehr lesen ...