LLMs zur Detektion von Phishing-Emails
LLMs zur Detektion von Phishing-Emails
Im Rahmen des Masterprojekts "Künstliche Intelligenz - ChatGPT in AKtion" im WS23/24 wurde von drei Erasmus-Studierenden ein Prototyp für einen Email-Checker entwickelt, der mit Hilfe eines Sprachmodells eine Email in Zimbra mit einem Chrome-Plugin auf Anzeichen von Phishing überprüft
Das Prinzip besteht darin, dass der Emailtext mit einem speziell entwickelten Prompt, der teilweise durch einen genetischen Algorithmus optimiert wurde, mit GPT-3.5 klassifiziert wird. Dabei berücksichtigt GPT bestimmte psychologische Aspekte [SMG22] und kann bei Bedarf auch erklären, warum die Email als Phishing erkannt wurde. Die Erkennungsrate auf einem Datensatz von Kaggle [Cha23] ist relativ hoch, fast 90% der Testmails werden korrekt als "Safe Email" oder "Phishing Email" klassifiziert. Das beste Modell hatte eine FP-Rate von knapp 7%. Das System soll Emails nicht aussortieren, sondern nur einen Warnhinweis in Form einer Ampel einblenden.
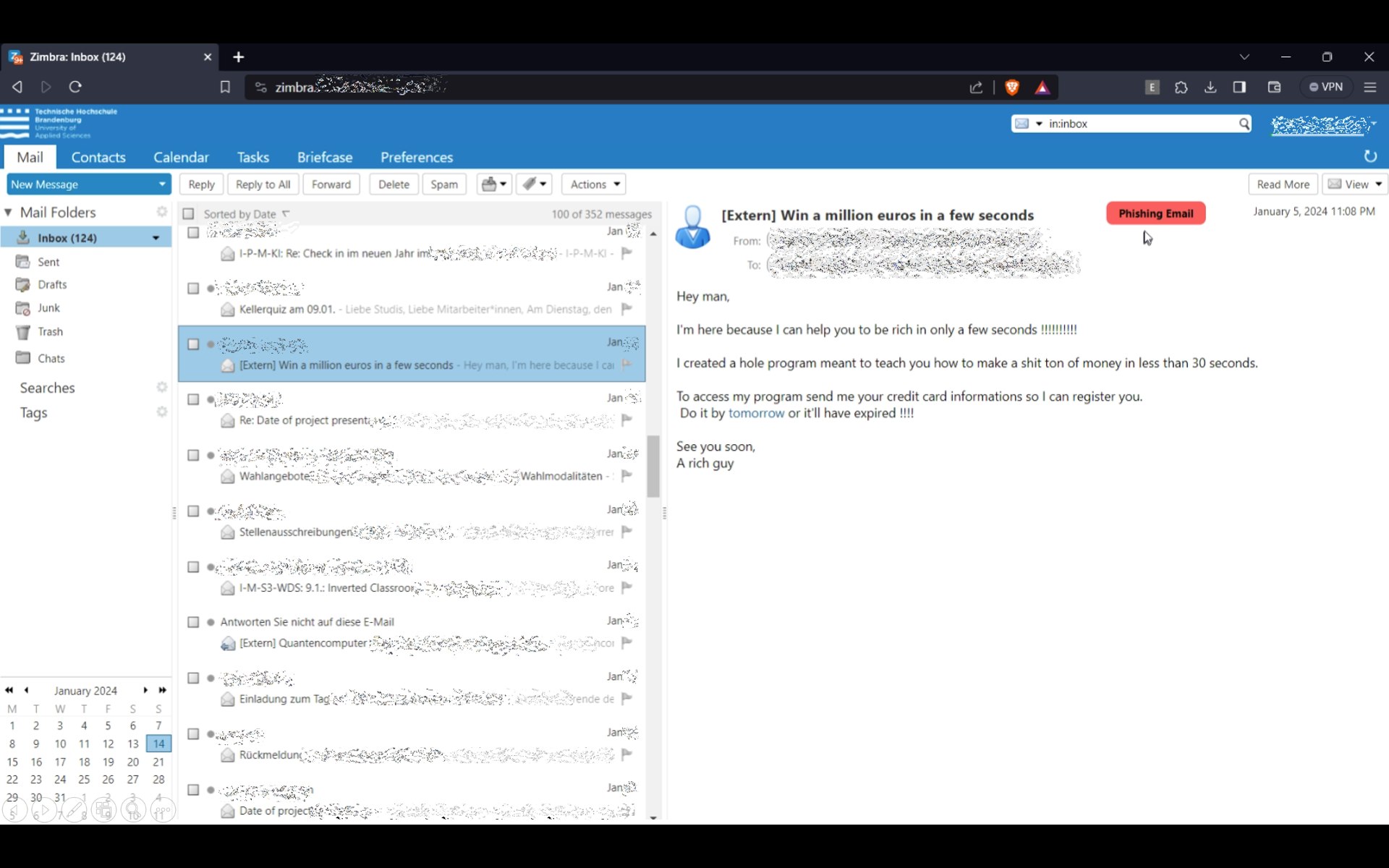
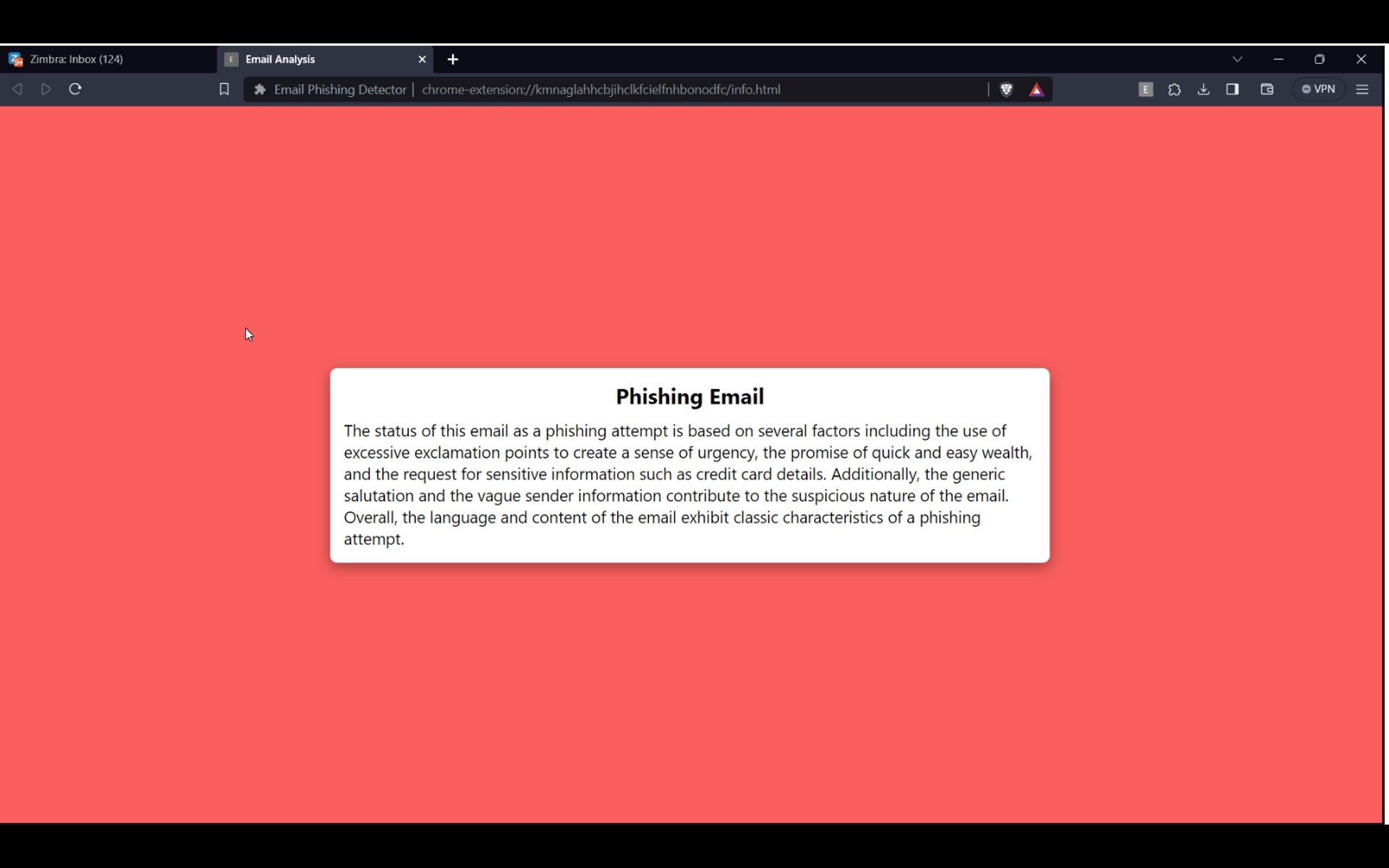
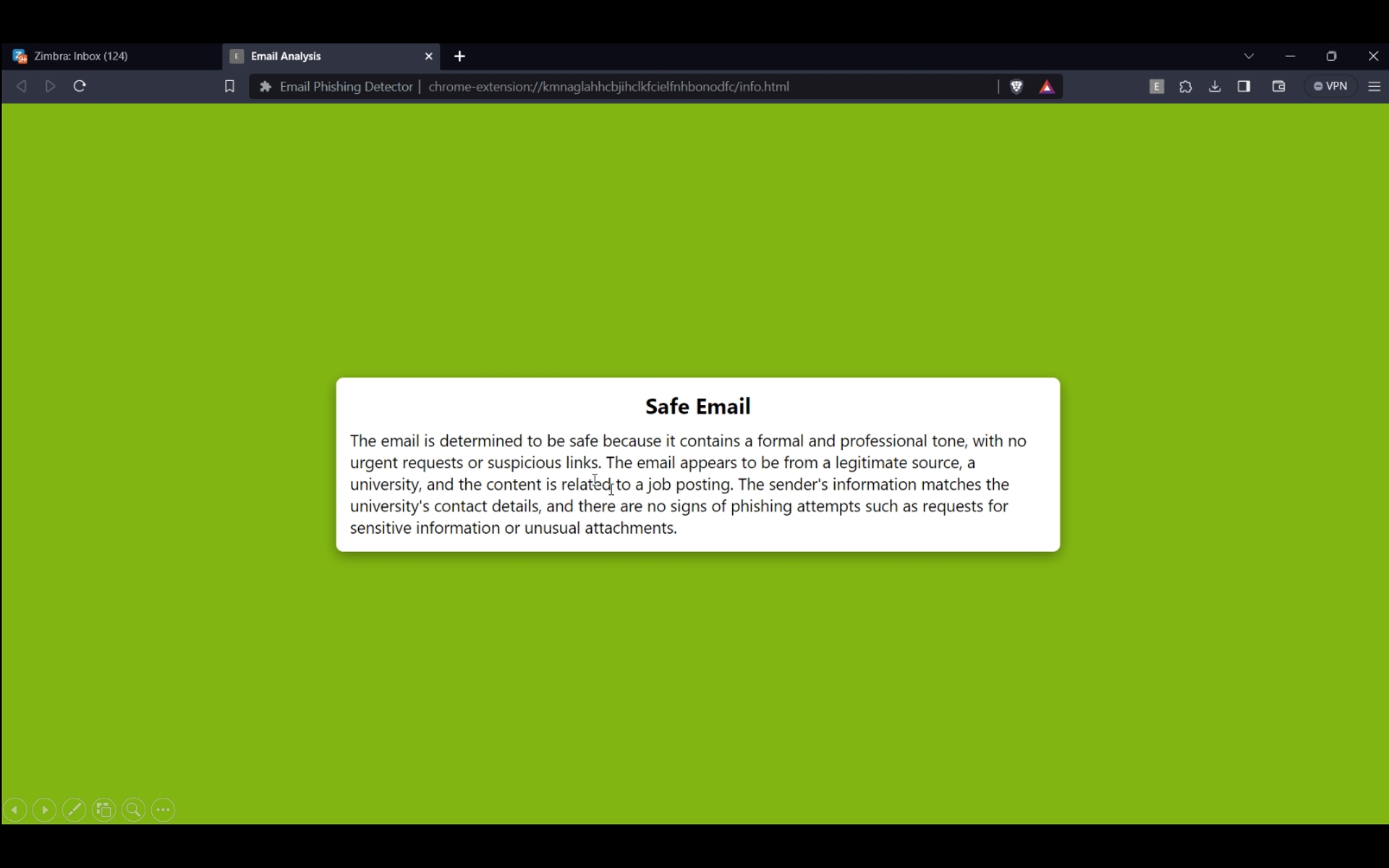
Diese Forschung trägt zum Verständnis bei, wie LLMs Cybersicherheits-Tools zum Erfolg verhelfen können. Die Bilder zeigen eine Phishing-Email und die Reaktion auf diese Email mit einer Ampel und einer Erklärung. Die Erklärung erläutert in einfachen Worten, welche Anzeichen von Phishing diese Email aufweist.
[Cha23] Chakraborty, Subhadeep: Phishing Email Detection. http://dx.doi.org/10.34740/KAGGLE/DSV/6090437. Version: 2023. https://www.kaggle.com/datasets/subhajournal/phishingemails/data
[SMG22] Shahriar, Sadat ; Mukherjee, Arjun ; Gnawali, Omprakash: Improving Phishing Detection Via Psychological Trait Scoring. 2022
Vortrag: 15.01.2024
Betreuer: Prof. Dr. Georg Merz, Dipl.-Inform. Ingo Boersch
Categories: Maschinelles Lernen