Das KI-Labor der Technischen Hochschule Brandenburg hat mit NOVA einen
neuen Laufroboter in Betrieb genommen. Bei NOVA handelt es sich um ein
Modell vom Typ Go2 EDU Plus des Herstellers Unitree,
ausgestattet mit modernster Sensorik wie LIDAR, der Middleware ROS 2
und frei programmierbar in Python.
NOVA kann Treppen steigen und unwegsames Gelände meistern. Er
erreicht eine Geschwindigkeit von bis zu 3,7 m/s und trägt
Lasten bis 8 kg. Der Roboter kann sowohl ferngesteuert
als auch autonom agieren und wird im Masterprojekt im
Sommersemster 2025 zum Einsatz kommen.
Damit ist er ideal für Forschungsvorhaben zu Feldrobotern,
Assistenzrobotern oder Such- und Rettungseinsätzen geeignet. Die
vielseitige Plattform wird Studierenden und Forschenden neue
Projektmöglichkeiten in der intelligenten Robotik eröffnen.
Autonome Intelligente Roboter – KI-Projekt im Wintersemester 2024/25
Im Projekt Künstliche Intelligenz des Wintersemesters
2024/25 entwickelten Studierende in 2- bis 3-köpfigen Teams kreative
Robotiklösungen, bei denen autonome und intelligente Handlungen im
Vordergrund standen. Ziel war es, Demonstratoren zu realisieren, die
nicht nur technisch funktionieren, sondern auch einen Showcase-Charakter
haben.
3 Anforderungen
Autonom intelligent handeln
Nützlich (perspektivisch)
Showcase, Demonstrator
Ausgangspunkt war eine Auswahl verschiedener Robotersysteme: Turtlebots,
NAOs, AKSEN-Boards, OpenManipulator-X und das
leistungsstarke NVIDIA AGX Orin. Nach einer dreiwöchigen Konzeptionsphase
mit intensiven Technik-Demos, individueller Betreuung und Feedback
entwickelten die Teams eine eigene Projektvision mit intelligentem
Verhalten – z. B. Navigation, Sprachausgabe, Objekterkennung, Planung
oder Lernen.
In mehreren Zwischenetappen wurden die Prototypen realisiert, getestet
und in einer Generalprobe verteidigt. Die Live-Vorführung am
15. Januar 2025, dem Tag der offenen Projekte der Bachelorstudierenden
des 5. Semesters, verlief anschaulich und erfolgreich. Gezeigt wurde
eine breite Palette an Anwendungen – von (physisch) mobilen Assistenten
über interaktive Lernsysteme bis hin zu Echtzeit-KI auf ressourcenarmer
Hardware.
Projektübersicht
Der Sortierroboter zeigt, wie mit minimaler Hardware autonome
Navigation und Farbsortierung für logistische Anwendungen realisiert
werden kann. Der Roboter fährt auf der Suche nach Objekten ins Lager und
bringt Fundstücke je nach Farbe zu definierten Abholpunkten. Die Planung
erfolgt per Breitensuche auf einem speicherschwachen AKSEN-Board
(7 KB) – eine technische Herausforderung mit großem Potenzial z. B. für
die Eingangssortierung in einem Warenlager.
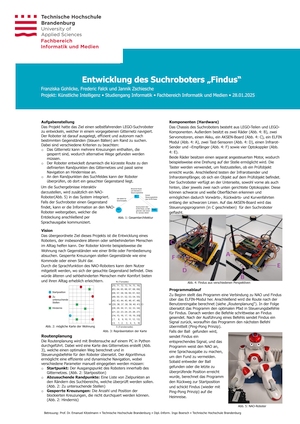
Findus kombiniert Pfadplanung mit Sprachrückmeldung: Der Roboter
durchsucht Räume nach verlegten Gegenständen und meldet sie über den
NAO-Roboter per Sprache – ein Konzept für Menschen mit eingeschränktem
Sehvermögen.
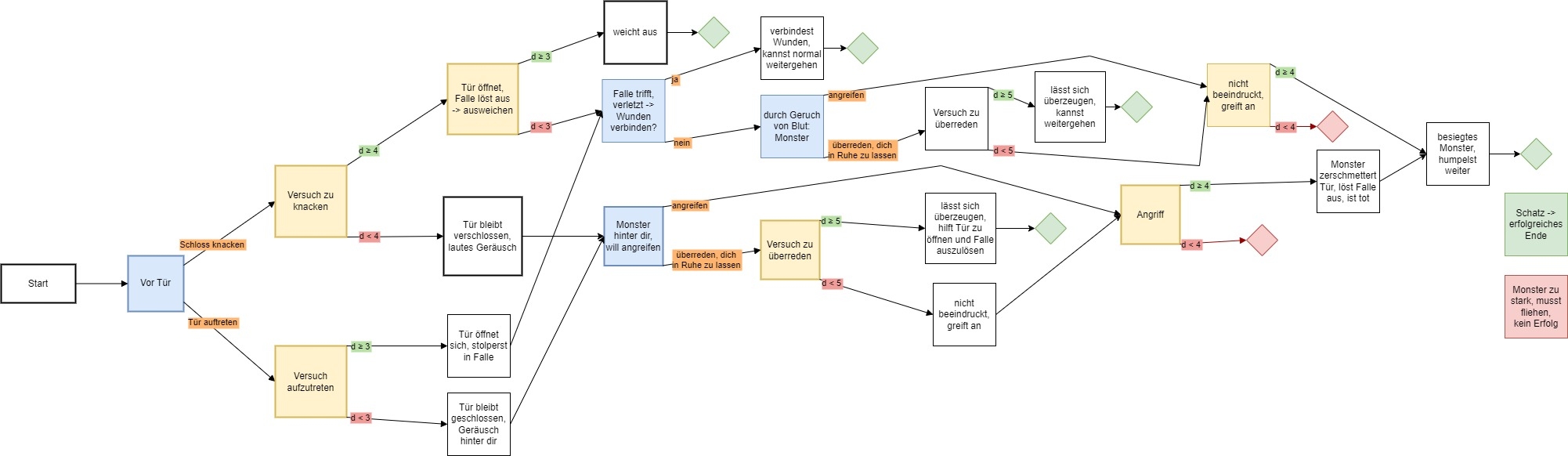
Der Dungeonmaster NAO verwandelt den Roboter in einen
interaktiven Spielleiter, der Würfel erkennt und mit Nutzer*innen eine
Geschichte durchlebt. Die Spiellogik ist als Automat (Abb. oben)
realisiert und deklarativ in einer Excel-Tabelle hinterlegt – ein
innovativer Ansatz für Lernspiele mit humanoiden Robotern.
Die Gruppe Drohnenparkour trainierte mit Teachable Machine
ein neuronales Netz zur Erkennung visueller Kommandos (z. B.
Richtungspfeile), die während des Flugs erkannt und ausgeführt werden.
Bei Erkennungsproblemen sorgt ein Spiral-Suchmuster für robuste
Ausführung. Die Anwendungsvision: intuitive Drohnensteuerung mit
Symbolen statt Programmierung oder Fernbedienung – ideal für Navigation
in Innenräumen oder bei Suchszenarien.
Betreuer: Prof. Dr. Emanuel Kitzelmann, Dipl.-Inform. Ingo Boersch
Creative Commons Lizenz
Soweit nicht anders angegeben, stehen die Texte, Bilder und Videos auf
dieser Webseite unter der Lizenz Creative Commons Namensnennung 4.0
International (CC
BY 4.0). Die Urheber sind die auf den Postern genannten Studierenden.