Mittwoch, Februar 25, 2026
Autonomes Personenfolgesystem mit einer Drohne (Q. T. A. Nguyen, Y.
C. Camacaro Querales)
DrohnenLab – Intelligente Flugsysteme im Wintersemester 2025/26
Im KI-Projekt des 5. Semesters im Wintersemester 2025/26 entwickelten
Studierende im DrohnenLab intelligente Flugdemonstratoren auf
Basis der Ryze Tello-Plattform. Ziel war die Umsetzung autonomer
oder teilautonomer Flugverhalten durch die Kombination von
Echtzeit-Bildverarbeitung, Flugsteuerung und externer Entscheidungslogik.
Die Aufgabenstellung umfasste die Entwicklung innovativer
Anwendungsszenarien unter Nutzung der integrierten Kamerasysteme
sowie Python-basierter Steuerungsbibliotheken – von
bildverarbeitungsbasierter Objektverfolgung bis hin zu automatisierten
Navigations- und Interaktionsmechanismen.
3 Anforderungen
-
Autonomes oder teilautonomes Flugverhalten
-
Anwendungsperspektive
-
Demonstrator / Showcase
Nach einer initialen Einarbeitungsphase in die Programmierung und
Steuerung der Drohnen entwickelten die drei Teams eigene Konzepte
zur Realisierung intelligenter Flugfunktionen, z. B. kamerabasierter
Zielverfolgung, automatisierter Landung mit Energieversorgung oder
autonomer Bilddatenerfassung für Panorama- und Navigationsaufgaben.
Ergebnisse
-
Autonomes Personenfolgesystem – Echtzeit-Personenverfolgung
(Quang Tuan Anh Nguyen, Yohanny Carolina Camacaro Querales)
-
Landepad mit Ladefunktion – Autonome Landung und korrekte
Lade-Positionierung (Andris Jefimovs, Benjamin Stürz)
-
Path Mapping & Aerial Panorama – Pfadplanung des THB-Logos
im Simulator, Aufnahme von 360°-Panoramen (Matteo Bossoletti, Magnus
Witt, Alexej von Freeden)
Beispiel: Autonomes Personenfolgesystem
Im Projekt wurde ein autonomer Verfolgungsmodus realisiert, bei dem eine
Drohne eine erkannte Zielperson in Echtzeit verfolgt und dabei ihre
Fluglage kontinuierlich anpasst. Die Videodaten der On-Board-Kamera
werden an einen externen Rechner übertragen, wo ein
Deep-Learning-basiertes Detektionsmodell (z. B. MobileNet-SSD) die
Position der Zielperson bestimmt und daraus Steuerbefehle für Yaw-,
Distanz- und Höhenregelung abgeleitet werden. Bei Verlust der Zielperson
wechselt das System automatisch in einen sicheren Such- oder Hover-Modus.
Betreuerin: Prof. Dr.-Ing. Darya Kastsian
Creative Commons Lizenz
Soweit nicht anders angegeben, stehen die Texte, Bilder und Videos auf dieser Webseite unter der Lizenz Creative Commons Namensnennung 4.0 International (CC BY 4.0). Die Urheber sind die auf den Postern genannten Studierenden.
Categories: AMS-Projekte, Maschinelles Lernen, RobotBuildingLab
Donnerstag, Februar 19, 2026
Untersuchung des Potentials von Netzwerkverkehrsanalysemethoden zur
automatischen Inventarisierung von Systemen in Krankenhäusern
Die Masterarbeit untersucht, inwieweit eine passive paketbasierte
Netzwerkverkehrsanalyse zur automatischen Klassifikation von Geräten
in medizinischen IT-Infrastrukturen eingesetzt werden kann. Ziel ist die
Unterstützung eines automatisierten Netzwerkinventars, das
insbesondere im Krankenhausumfeld eine zentrale Rolle für
IT-Sicherheit und Systemübersicht spielt.
Ausgangslage: Trotz der hohen Bedeutung aktueller
Netzwerkinventare mangelt es an öffentlich verfügbarer Forschung zur
automatisierten Geräteerkennung im Gesundheitswesen. In der Arbeit wird
daher ein Proof of Concept zur Geräteklassifikation in medizinischen
Netzwerken durch Reproduktion einer bestehenden Forschungsarbeit
implementiert und evaluiert.
Datengrundlage:
-
zwei öffentliche DI-Datensätze IoTSentinel und UNSW-IoTDevID
-
ein medizinischer IoMT-Datensatz CICIoMT2024
-
ein neu erstellter HeliosLabor2025-Datensatz aus realem
Labornetzwerkverkehr der Helios-Kliniken-Gruppe
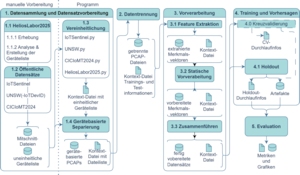
Methodik: Auf Basis passiv aufgezeichneter Netzwerkpakete werden
paketbasierte Merkmale extrahiert und mit überwachten Lernverfahren
klassifiziert. Hierzu werden verschiedene Entscheidungsbaum- und
Random-Forest-Modelle trainiert und anhand üblicher Metriken wie dem
Macro-F1-Score evaluiert. Aufgrund unausgeglichener Datensätze erfolgt
die Bewertung über aggregierte Vorhersagen. Bei der Evaluation muss das
durch geräteweises Splitting verursachte Data Leakage beachtet werden.
Ein Klassifikations-Ansatz aus [1] wird zur Analyse reproduziert.
Ergebnisse:
-
Reproduktion von [1] liefert vergleichbare Ergebnisse zum
UNSW-IoTDevID-Datensatz.
-
CICIoMT2024 zeigt trotz zusätzlicher simulierter Geräte eine
akzeptable Klassifikationsleistung.
-
HeliosLabor2025 liefert vielversprechende Resultate im Realbetrieb.
-
Einige schwer erkennbare Gerätetypen konnten identifiziert werden.
Fazit: Die Arbeit zeigt, dass verhaltensbasierte
Geräteklassifikationsmethoden aus IoT-Netzwerken erfolgreich auf
medizinische IT-Infrastrukturen übertragbar sind. Eine automatische
Unterstützung bei der Inventarisierung von Krankenhausnetzwerken
erscheint damit plausibel.
[1] K. Kostas, M. Just, und M. A. Lones, „IoTDevID: A
Behavior-Based Device Identification Method for the IoT“, IEEE
Internet of Things Journal, Bd. 9, Nr. 23, S. 23741–23749, Dez. 2022,
doi: 10.1109/JIOT.2022.3191951
Kolloquium: 19.02.2026
Betreuer: Prof. Dr. Michael Pilgermann, Dipl.-Inform. Ingo Boersch
Download: A1-Poster
Lizenz: Creative Commons CC
BY-NC-SA 4.0 - Namensnennung – Nicht kommerziell – Weitergabe unter
gleichen Bedingungen 4.0 International
Categories: Abschlussarbeiten, Maschinelles Lernen