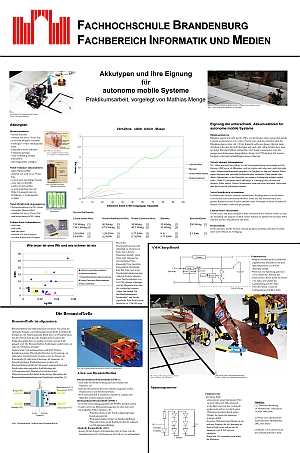
Recherche und Poster zum Thema "Akkumulator-Arten"
Praktikumsarbeit (Gymnasium) von Mathias Menge
Download: A1-Poster
Categories: AMS-Projekte, RobotBuildingLab

Lösung komplexer "Pickup and Delivery" Probleme unter Einbeziehung
moderner Constrainttechniken
Für die Tourenplanung innerhalb der Entsorgungs- und Baubranche sollen
moderne Constrainttechniken analysiert und eine Softwarebibliothek
entwickelt worden. Hierzu solIte der Stand der Forschung auf den
Gebieten der "Constraint-Satisfaction" und von "Constraint Systemen"
einfließen und bei der Analyse der Fahrzeugplanung hinsichtlich der
Anforderungen an die zu schaffende Softwarebibliothek beachtet worden.
Für die Arbeit sollten geeignete Constraint-Solver-Bibliotheken
hinsichtlich des Fahrzeugroutens evaluiert und ein zweckmäßiger
Constraint-Solver ausgewählt werden.
Unter Einbeziehung des gewählten Solvers stand es zur Aufgabe, eine
Softwarebibliothek zu entwerfen und zu implementieren, die gegebene
"Pickup and Delivery" Probleme 1öst. Die Implementierung sollte in C/C++
oder in Delphi (Objektpascal) durchgeführt werden. Dabei war zu
beachten, dass die entwickelte Bibliothek von Delphi-Programmen aus
nutzbar und auf dem Betriebsystem Windows NT 4 lauffähig sein musste.
Abgabe: 22.04.2002 Kolloqium: 25.06.2002
Betreuer: Prof. Dr.-Ing. Jochen Heinsohn, Dipl.-Ing (FH) Torsion Storrer
(IVU Traffic Technologies AG)
Downloads: Diplomarbeit
A1-Poster
Vortrag
Categories: Abschlussarbeiten, Maschinelles Lernen

FIRST LEGO League
-
Internationale Wettbewerbe mit LEGO-RCX/NXT/EV3-Robotern für Schüler
von 9 bis 16 Jahren
-
Teams entwickeln gemeinsam Roboter und Forschen zum
Wettbewerbsthema
-
Aktuelle Themen aus Wissenschaft und Technologie z.B. Energiekrise,
Klimawandel, Lebensmittelsicherheit, Naturkatastrophen
-
Start 1998 USA, seit 2001 in Deutschland
In Zentraleuropa organisiert der Verein Hands
on Technology die LEGO League in sieben Ländern (D, A, CH, H, CZ,
PL, SK): 59 Regionalwettbewerbe - 835 Teams - über 6000 Kinder und
Jugendliche - 20% Mädchen.
Ablauf
-
April: Start Anmeldung der Teams
-
August/September: Veröffentlichung der international identischen
Aufgabe
-
8 Wochen intensive Konstruktion
-
November bis Januar: Regionalwettbewerbe
-
danach: Qualifikationstuniere (erstmals 2008)
-
danach: Bundesfinale (erstmals 2002)
-
danach: Weltmeisterschaft (erstmals 2003/2004)
Categories: LEGO League
Donnerstag, Juni 20, 2002
|
KI-Projekt im SS 2002 - Energieautonome Mobile Roboter
|

Aufgabe
Die Aufgabe dieses Semester besteht in der Konzeption, Konstruktion und
Programmierung eines energieautonomen mobilen Roboters. Sie erhalten dazu
ein AMS-Kit sowie ein kleines Budget für selbstentwickelte Hardware (z.B.
Dockingstation). Ziel ist ein Roboter, der im zugewiesenen Areal endlos
"lebt" und seine Energiereserven bei Bedarf autonom auffüllt.
Energieversorgung mobiler Systeme

Projektplan
|
Phase
|
Dauer in Wochen
|
|
Einführung, Bau eines autonomen mobilen Systems
|
3
|
|
Konzeption der Docking-Lösung
|
3
|
|
Bestellung und Verteidigung der Konzeption
|
2
|
|
Konstruktion und Programmierung
|
4
|
|
Wettbewerb "Wer lebt am längsten"
|
1
|
Verlauf
|
Datum
|
Ereignis
|
|
Freitag, 21. Juni 2002:
|
9:00 Uhr - Robot Team2 hat mehr als 13 Stunden geladen und scheint
seine anvisierte Ladeschlußspannung nicht zu erreichen - Änderung
des Quellcodes - Neustart - wäre fast ein Punkt für Team1, aber
Robot Team1 starb den Heldentod durch unbemerktes Hängenbleiben an
seiner Ladestation; er entlud sich vollständig - damit ein Punkt für
Team 2 für das Überleben - damit steht es 0:1:0 für
Team 2
|
|
Samstag, 22. Juni 2002
|
22:30 Uhr - Robot Team 2 dreht sich endlos mit \"Runtime Error 9\"
(Rangeoverflow durch Floa-Int-Cast) im Kreis - Reset notwendig,
damit ein Punkt für Team 1 - damit steht es 1:1:0
|
|
Sonntag, 23. Juni 2002
|
Um 21.45 Uhr wurde von Team 1 festgestellt, dass \"Sid\"(Team2) in
seinem fortgeschrittenen Alter verstorben ist. Nach Verlust des
altersschwachen linken Rades ist er jämmerlich verhungert. Die
Wiederbelebungsversuche von Team 1 waren leider Gottes nicht
erfolgreich. Team 1 hofft auf Reinkarnation von \"Sid\" als
\"Sid-2\". Somit steht der Testlauf bei: 2:1:0 Auf
ein faires Match .. Michael Hensel, Mark Rambow, Yann Wacker
|
|
Donnerstag, 27. Juni 2002
|
Wartungspause - 17:00 Uhr Neustart der Systeme
|
|
Mittwoch, 10. Juli 2002
|
Darth Vader verschob seine Dockingstation und hatte kein Chance zum
Andocken mehr, damit ein Punkt für Team 2 - damit steht es 2:2:0
|
|
Freitag, 12. Juli 2002
|
Abschalten der Roboter bis 6.8.2002 wegen Urlaub.
|
|
Dienstag, 6. August 2002
|
Einschalten der Roboter: Beide Roboter haben trotz des
ausgeschalteten Boards ihre Akkus komplett entladen - Sid kannte
noch sein Programm, DarthVader kannte sich selbst nicht mehr.
DarthVader konnte problemlos mit einem neuen Akku und seinen
Programm bestückt werden und fuhr sofort los. Bei Sid lässt sich der
Akku nicht ohne weiteres wechseln, so dass der Akku 20 min mit 600
mA (an)geladen wurde, dann kroch auch Sid zur Dockingstation.
|
|
Freitag, 9. August 2002
|
Darth Vader schein ein Problem mit seinem IR-Abstandssensor zu haben
- er verhungerte an der Docking-Station. Ob das Team ihn wieder
belebt? Sid (Team 2) erhält einen Punkt - damit steht es 2:3:0
|
|
Donnerstag, 22. August 2002
|
Eigentlich nichts besonderes - Sid zieht seit 16 Tagen zuverlässig
seine Bahnen, nur an den Achsen tritt vermehrt Staub von zermahlenen
LEGO-Steinen aus.
|
|
Freitag, 30. August 2002
|
Sid wird abgeschaltet - das Spielfeld wird für die Projektwoche
gebraucht. Damit ergibt sich folgender Endstand: Sid gewinnt mit
über 30 Tagen Fahrzeit knapp gegen DarthVader, der zum Schluß mit
einem defekten IR-Sensor verhungerte.
|
Projektschein


Farnell Deutschland stellt im Rahmen ihres Education Programms die
elektronischen Bauteile für das Projekt zur Verfügung.
Im
Bild übergibt Field Sales Manager Michael Jainz die Gutscheine an Prof.
Heinsohn.
Wesentliche Erkenntnisse des Projektes

-
Es ist möglich, energieautonome Roboter mit 6.270-Boards + Legotechnik
umzusetzen.
-
Behaviorbasierte Architekur (Subsumption/Brooks) gut geeignet
-
Behaviors müssen mit einer Erwartungshaltung observiert werden
(Zeitlimit, Streßlevel o.ä.)
-
Behaviors der Selbstbeobachtung müssen zufällige Entscheidungen
treffen, um dead locks zu vermeiden
-
Lichtabhängigkeit der Systeme (insbesondere beim Hindernisvermeiden)
durch IR-Differenzmessung vermeidbar
-
Ladeschaltung zum Aufladen von Robotern mit 6.270-Boards wurde
entwickelt
-
Fotos
aus dem Projekt
-
Eine Bewertung von Akkutypen bezüglich der Eignung für Autonome Mobile
Systeme finden Sie im Poster
zu Akkumulator-Arten (Schülerpraktikum Mathias Menge)
Links
-
SlugBot -
Ein Roboter sammelt Schnecken zur Energiegewinnung (IAS-Labor der
University of the West of England)
-
Gastrobots - Roboter, die Ihre
Energie aus natürlichen Materialien, z.B. aus Zuckerwürfeln, beziehen
(University of South Florida)
Categories: AKSEN, AMS-Projekte, RobotBuildingLab