Mittwoch, August 29, 2012
 Interaktive Evolution zur Assistenz bei der Einrichtungsplanung
Interaktive Evolution zur Assistenz bei der Einrichtungsplanung
Die Planung der Inneneinrichtung von Räumen ist oft aufwändig und
zeitintensiv, da ein weites Spektrum verschiedenster
Einrichtungsgegenstände verfügbar ist und diese fast beliebig kombiniert
werden können. Diese Arbeit schlägt interaktive evolutionäre Algorithmen
zur Assistenz bei der Einrichtungsplanung vor. Dazu werden zunächst die
Bestandteile der interaktiven Evolution genauer definiert und Arten der
interaktiven Selektion vorgestellt. Anschließend wird die Konzeption und
Entwicklung des Softwaresystems dokumentiert.
Zur Verringerung der Benutzerermüdung wird die Methode der Sparse
Fitness Evaluation umgesetzt. Es werden Versuche mit der
entwickelten Software durchgeführt und aufgetretene Probleme diskutiert.
Abschließend gibt die Arbeit einen Ausblick für eine weitere Entwicklung.
Kolloqium: 29.08.2012
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr.-Ing. Michael Syrjakow
Download: A1-Poster,
Masterarbeit,
Quelltexte
(85MB)
Software: Furny-1.0.zip
in ein beliebiges Verzeichnis entpacken, in dieses Verzeichnis wechseln
und den gewünschten Teil mit den .bat-Dateien starten
Categories: Abschlussarbeiten, Maschinelles Lernen
 Modellierung und Simulation eines autonomen Segelbootes
Modellierung und Simulation eines autonomen Segelbootes
Ziel der Arbeit ist es, ein Bewegungsmodell zu entwickeln, welches die
Bewegungen eines Segelbootes im Wasser abbildet, und dieses zu
simulieren. Augenmerk bei der Modellierung liegt auf der Darstellung
physikalischer Zusammenhänge, die am Segelboot zum Tragen kommen. Sowohl
Bereiche der Mechanik als auch der Strömungsdynamik müssen in Betracht
gezogen werden.
Neben dem Modell soll ein Simulationsprogramm entstehen, mit dessen
Hillfe Anwendungsfälle am Computer getestet werden können.
Kolloquium: 24.08.2012
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr. Jochen Heinsohn
Download: A1-Poster
Categories: Abschlussarbeiten, AMS-Projekte, RobotBuildingLab
 Konzeption und Realisierung einer kontextbasierten Suche in externen
Datenquellen im Bereich der Neurobiologie
Konzeption und Realisierung einer kontextbasierten Suche in externen
Datenquellen im Bereich der Neurobiologie
Diese Masterarbeit befasst sich mit der Konzeption und Realisierung
einer kontextbasierten Suche in externen Datenquellen. Die
kontextbasierte Suche soll hierbei für das Abfragen der Datenquellen die
Daten eines bestehenden Systems verwenden. Die Daten des bestehenden
Systems basieren dabei auf neurologischen Erkrankungen und Testverfahren.
Die Ergebnisse der kontextbasierten Suche sollen zum einen dafür
verwendet werden, um einem Benutzer des Systems ein größeres Angebot an
Informationen zum Themengebiet zu unterbreiten und zum anderen um den
Datenbestand des Systems bei Bedarf zu aktualisieren. Die externen
Datenquellen sind PubMed und MedWorm. Dabei werden in PubMed relevante,
medizinische, Publikationen und in MedWorm nach relevanten medizinischen
Nachrichten gesucht.
Kolloqium: 13.08.2012
Betreuer: Prof. Dr.-Ing. Susanne Busse, Dipl.-Inform. Ingo Boersch
Download: A1-Poster,
Masterarbeit, opus
Categories: Abschlussarbeiten
Dienstag, August 14, 2012
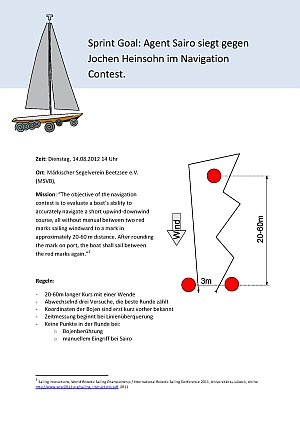
Agent Sairo (ein Programm zur Steuerung des autonomen Segelbootes) tritt
gegen Jochen Heinsohn in einem Up-and-down-Kurs auf dem Beetzsee an. Die
Navigationsaufgabe
entspricht einer Einzelaufgabe beim WRSC und besteht aus dem Überqueren
einer 3m-breiten Startlinie, Fahrt gegen den Wind um eine Boje gegen die
Uhrzeigerrichtung und Rückkehr über die Startlinie
Mission
“The objective of the navigation contest is to evaluate a
boat’s ability to accurately navigate a short upwind‐downwind course,
all without manual between two red marks sailing windward to a mark in
approximately 20‐60 m distance. After rounding the mark on port, the
boat shall sail between the red marks again.”
[Sailing
instructions, World Robotic Sailing Championship / International Robotic
Sailing Conference 2011, Universität zu Lübeck]
Regeln
-
20‐60m langer Kurs mit einer Wende
-
Abwechselnd drei Versuche, die beste Runde zählt
-
Koordinaten der Bojen sind erst kurz vorher bekannt
-
Zeitmessung beginnt bei Linienüberquerung
-
Keine Punkte in der Runde bei: Bojenberührung,manuellem Eingriff bei
Sairo
-
Start gegen den Wind
Ergebnisse
Fotos
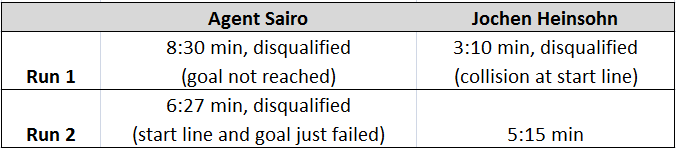
Table: Winner at 14.08.2012 is human
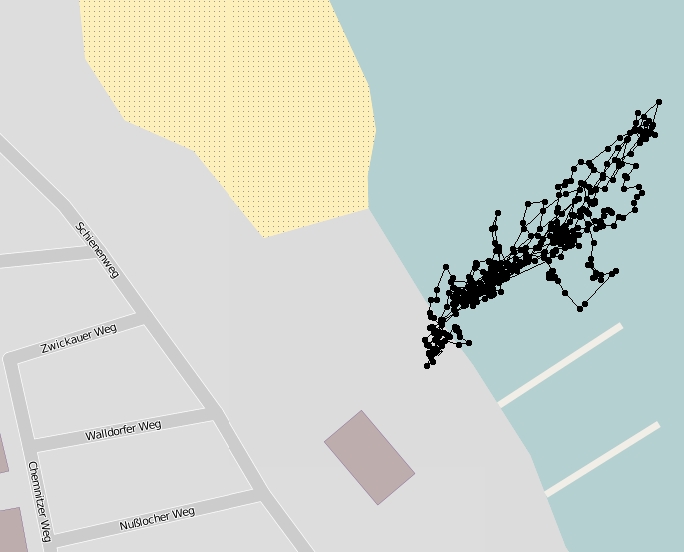
Fig: Waypoints of the agent
Fig: Screenshot mission control station
Categories: AKSEN, AMS-Projekte, Maschinelles Lernen, RobotBuildingLab