Pizzabote - Robot Building Lab im WS17/18
Der autonome Pizzabote SAE-Level 5
Im Straßenverkehr werden Autos von leistungsfähigen Fahrerassistenzsystemen gesteuert - aber bisher nur im SAE-Level 2 [1], d.h. unter ständiger Beobachtung des Fahrers. Aktuelle Pressemeldungen berichten von ersten Serien-Fahrzeugen mit SAE-Level 3, in denen der Fahrer seine Aufmerksamkeit abwenden darf und bei Problemen vom Auto gerufen wird [2].
Stellen wir uns nun einen unbemannten Transportroboter vor, der auf einer öffentlichen Straße vorsichtig Güter von A nach B transportiert, bspw. einen Pizzaboten mit SAE-Level 5 für den Stadtverkehr. Probleme bei der Auslieferung entstehen bei Staus, Baustellen oder durch liegenbleibende Fahrzeuge. Der damit verbundene Verlust befahrbarer Strecken erfordert ein Neuplanen von Fahrtrouten. Und hier kommen Sie ins Spiel.
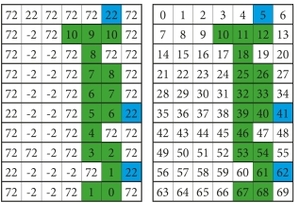
Ihr Roboter erhällt den Auftrag, eine oder mehrere Pizzen auszuliefern. Das Streckennetz ist ein einfaches Gitter, in dem es allerdings zu Störungen und damit unbefahrbaren Kreuzungen kommen kann. Die gute Nachricht ist, das Sie über globales Wissen verfügen und die aktuelle Karte der befahrbaren Wege dem Roboter kurz vor dem Start zur Verfügung gestellt wird. Entwerfen, konstruieren und programmieren Sie einen geeigneten Roboter!
Roboter
Im Wettkampf Ende Januar 2018 traten die vier Roboter Sion, Simon, Kabelbinder-Jack und Roberat gegeneinander an, wobei die letzteren mit automatischer Wegplanung fuhren. Die Ergebnisse finden sich in der Punktetabelle. Im Finale setzte sich Kabelbinder-Jack knapp gegen Sion durch.
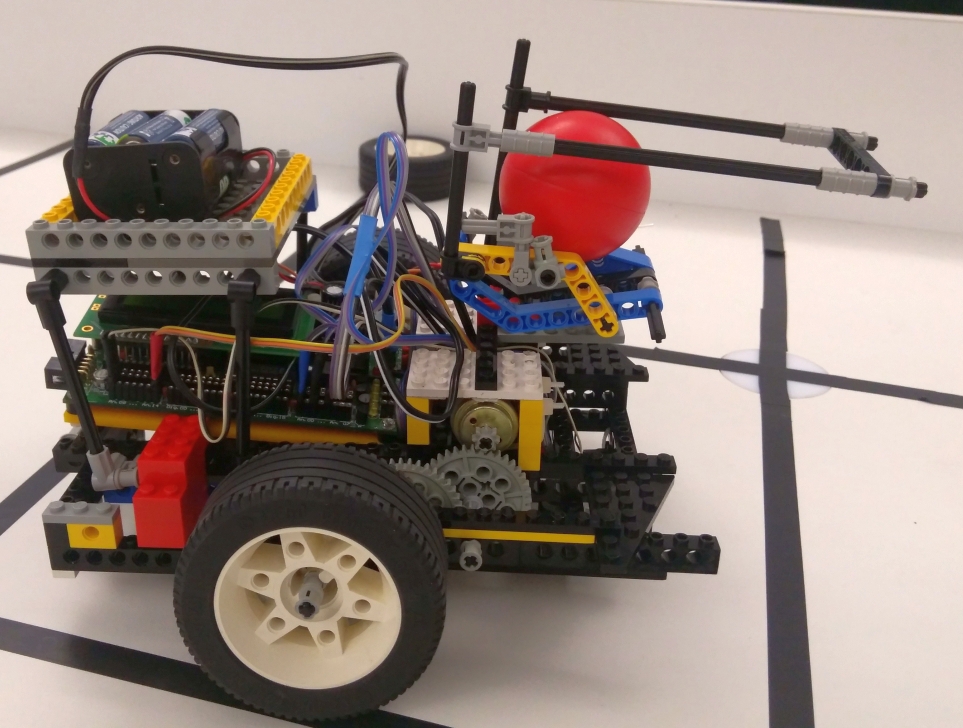
Die Roboter werden in folgenden Projektarbeiten beschrieben.
-
Roboter
Roberta
"Da Roberta sich beim Abarbeiten längerer Fahraufträge einige Male wie eine „Prinzessin“ verhalten hat, dachten wir, es wäre eine gute Idee, zu überlegen, die Fahraufträge nach der zurückzulegenden Distanz zu sortieren. So kann sich Roberta langsam an die Herausforderungen des Alltags gewöhnen. Die Fahraufträge werden nun aufsteigend nach den Kosten der jeweils nächsten erreichbaren Kreuzung sortiert. So erhalten Fahraufträge mit geringeren Kosten eine höhere Priorität als jene mit höheren Kosten. Als Sortierverfahren haben wir den Bubblesort angewendet." -
Roboter
Kabelbinder-Jack
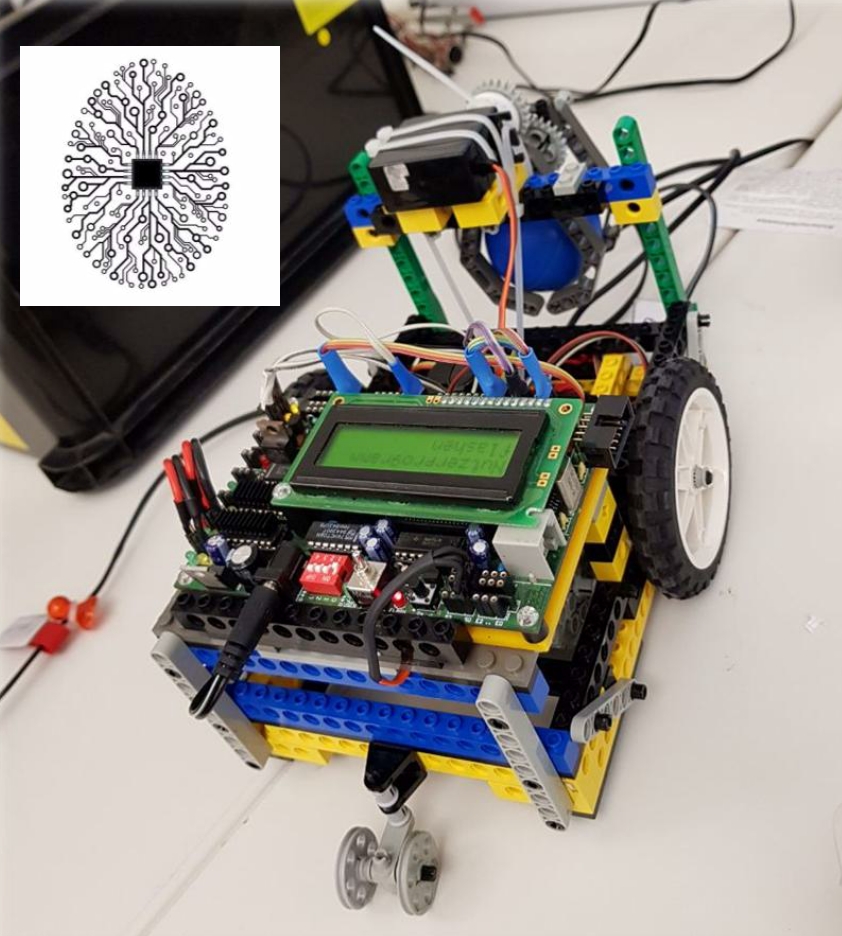
"Dieses Projekt hat uns sehr viel Spaß gemacht und unser Roboter „Kabelbinder-Jack“ ist ein Ergebnis guter und konstanter Teamarbeit. Wir haben alle während des Semesters geforderten Ziele umgesetzt und rechtzeitig zum Wettbewerb einen konkurrenzfähigen Roboter an den Start gebracht. Auch wenn es trotzdem noch einiges zu verbessern gibt, sind wir mit unserer Arbeit zufrieden, da der Roboter jede Route aus der Datei der Fahraufträge erfolgreich bewältigen kann. " -
Roboter Sion
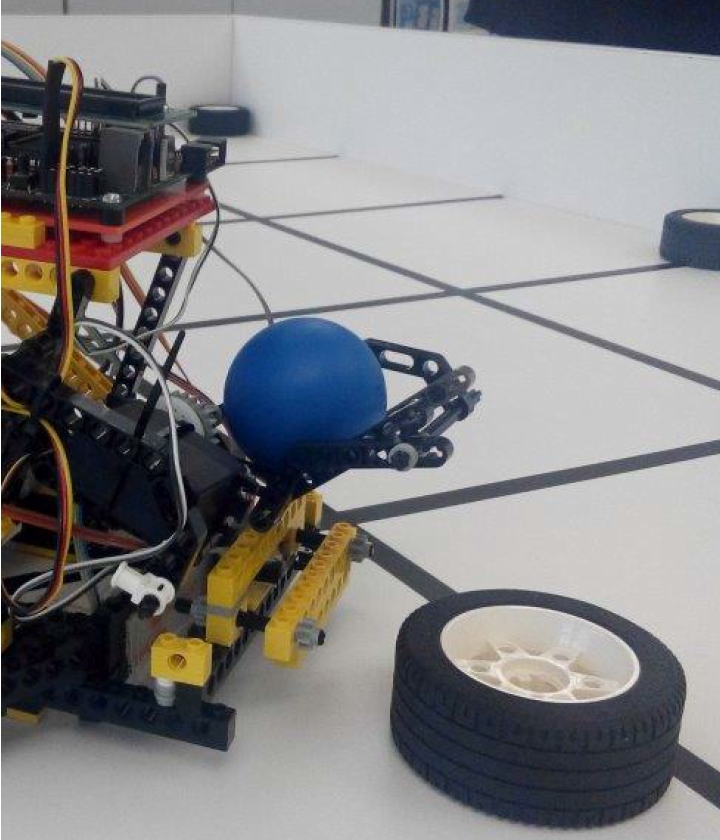
"Am Anfang war alles ja noch sehr ruhig und machte auch viel Spaß, aber irgendwann begann der Druck zu steigen, weil auch die Anforderungen stiegen. Nachdem der Roboter schon geradeaus fahren konnte sollten wir jetzt Greifer bauen, und damit auch die entsprechenden Getriebe montieren und einen Taster noch dazu, damit der Roboter weiß, dass er zum Lieferpunkt der Pizza angekommen ist. Gehen wir einfach mal tiefer in den Aufbau… "
[1] Levels of driving automation are defined in SAE INTERNATIONAL STANDARD J3016
[2] Audi 07/11/17 The new Audi A8: future of the luxury class