Reimplementierung einer Objekterkennung im Kanurennsport durch ein
aktuelles Convolutional Neural Network und Vergleich mit den
Vorgängerversionen
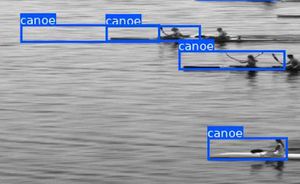
Ziel der Arbeit sind Deep Learning-Methoden aus dem Stand der Forschung
und ihre Implementierungen zur Detektion von Kanus und Ruderbooten in
Zeilenkamera-Bildern. Hierzu sollen geeignete Ansätze identifiziert,
exemplarisch auf dem Deep Learning-Server des Fachbereiches mit den
Kanudaten trainiert, evaluiert und mit den im Einsatz befindlichen
Netzversionen verglichen werden. Eine Detektion auf der Zielplattform
Jetson Nano ist optional, sollte aber berücksichtigt werden.
Schwerpunkte sind die Darstellung der Funktionsweise eines sinnvoll
gewählten Modells, des Vorgehens beim Training, bei der
Hyperparameteroptimierung und beim Vergleich mit den Vorgängermodellen.
Eine wichtige nichtfunktionale Anforderung aus Sicht des Unternehmens
ist die Verständlichkeit, Nachvollziehbarkeit und Wiederholbarkeit der
Arbeit.
Kolloqium: 18.02.2022
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr.-Ing. Jochen Heinsohn,
Dipl.-Inform. (FH) Daniel Schulz (IMAS Startanlagen und Maschinenbau)
Das Unternehmen Nuro.ai (Kalifornien) entwickelt ein kleines
vollautomatisches Lieferfahrzeug und erhält im Jahr 2019 eine
Finanzspritze von 940 Millionen Dollar. Geldgeber ist der
Investmentfonds des japanischen Technologiekonzerns Softbank. Es folgt
eine Kooperation mit Domino’s Pizza: "Once an order is ready to be
delivered from a participating location, Domino’s employees will load it
into one of several compartments in Nuro’s thin, stout R1, which packs a
proprietary combo of laser sensors, cameras, and computers. The vehicles
top out at 25 miles per hour and are fully driverless ...".
Ist das schon SAE-Level 4?
Eine Zeitlang werden die Lieferroboter von einer Eskorte begleitet, aber
das ändert sich im Jahr 2021: die aktuelle Version R2X fährt
ohne Eskorte - allerdings nun mit einer Fernsteuerung als Lösung für
Notfälle.
Das Team
Nuro nennt in seiner Stellungnahme an die NHTSA vier (unscharfe)
Bedingungen, damit der Lieferroboter SAE-Level 4 erreicht:
eine gute Karte,
langsamer als 25km/h,
schönes Wetter und
keine komplexen Situationen, wie Unfälle, Straßensperrungen ....
Zitat: "When these conditions are met, our vehicles operate
autonomously without any expectation that a driver or passenger will
respond to a request to intervene, meeting the Society of Automotive
Engineers’ definition of Level 4 autonomy. " [Quelle: Delivering
Safety: Nuro’s Approach (PDF)]
Aufgabe
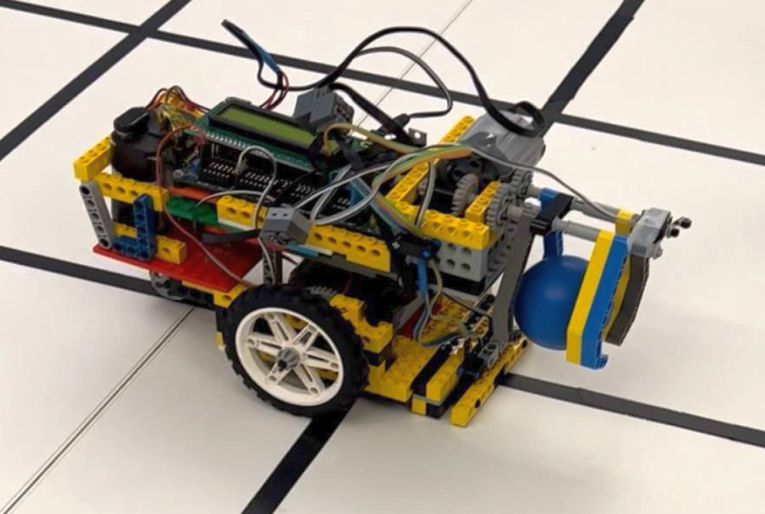
Konstruieren Sie mit dem AKSEN-Board ein mobiles autonomes System
(Roboter), der im Testareal des KI-Labors Pizzen einzeln an mehrere
Kunden ausliefert - aber Vorsicht: einige Kreuzungen sind gesperrt! Und
natürlich muss ein Robotersystem mit Stromversorgung, Motoren,
Getrieben, geeigneten Sensoren und Greifer gebaut werden. Falls die
Probleme zu groß werden (und groß werden sie auf jeden Fall), besteht
die Fallback-Möglichkeit beim Abschlusswettbewerb mit einem manuellen
Planer zu starten.
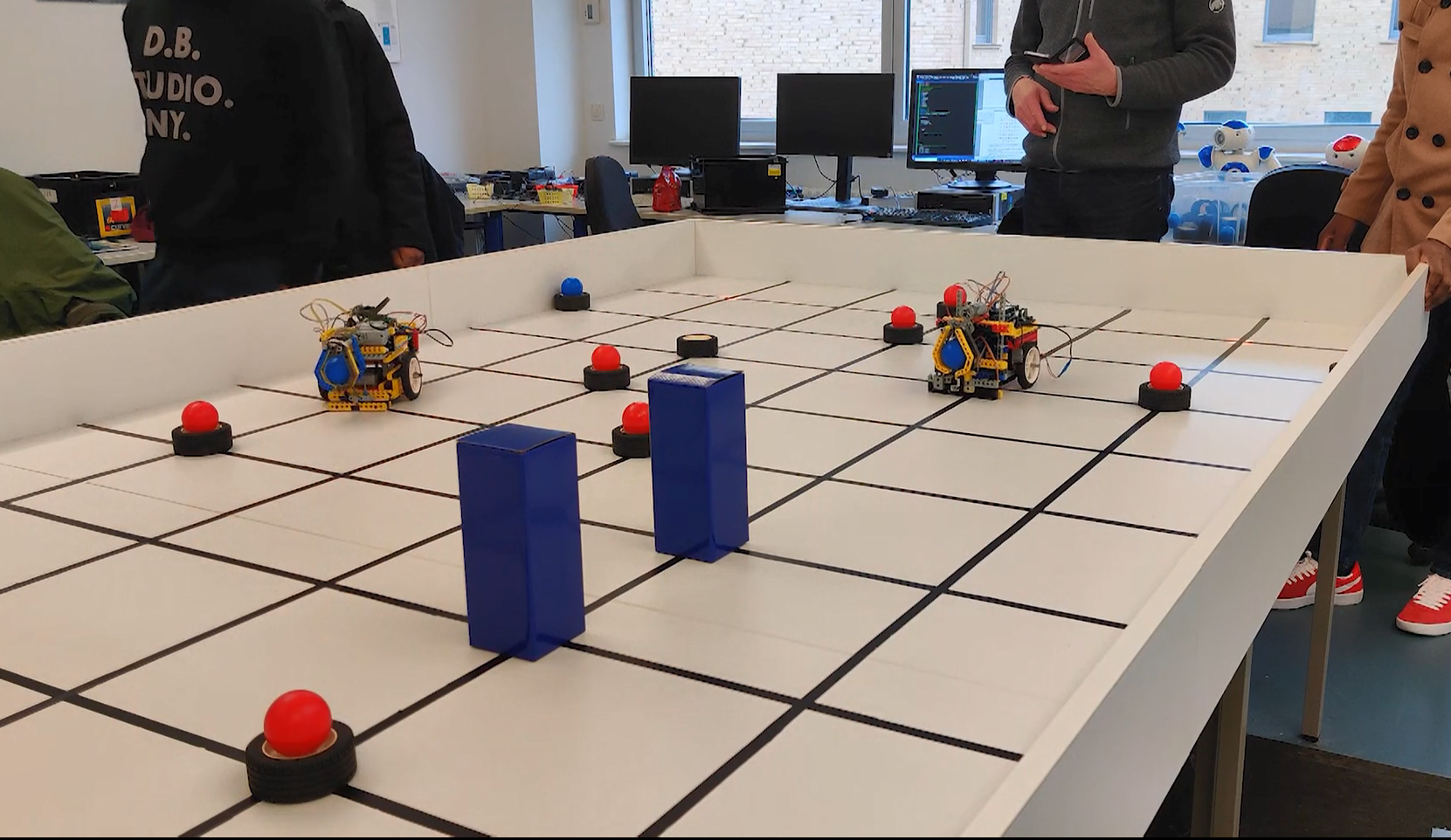
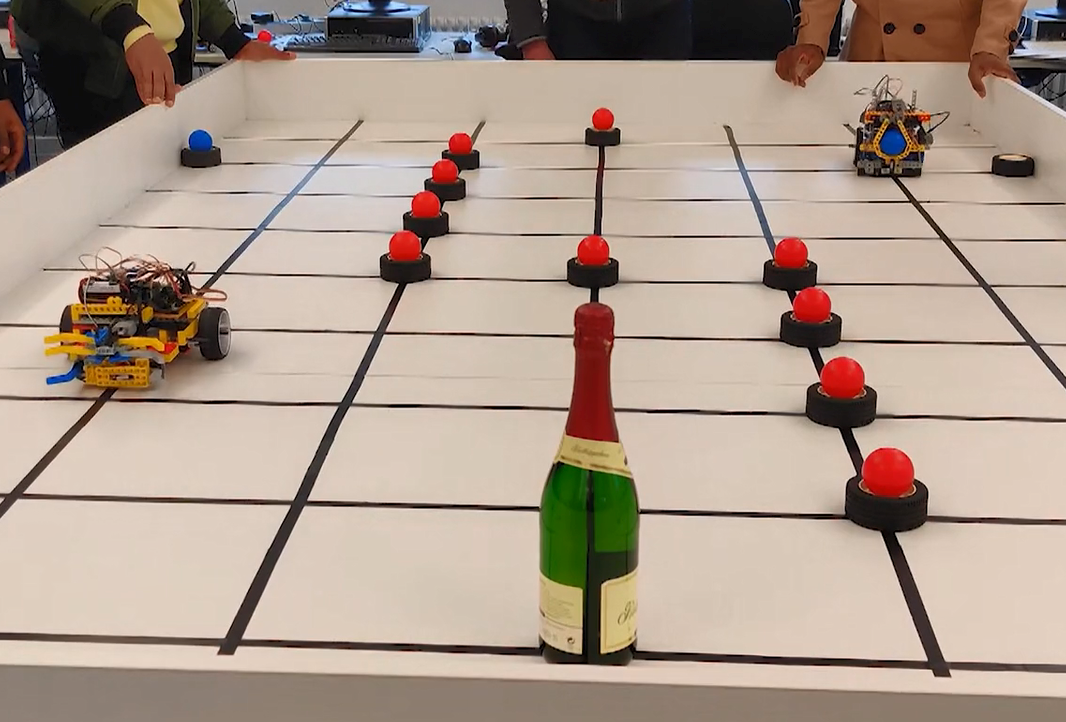
Wettbewerb am 13. Januar 2022 im eingeschränkten Präsenzbetrieb.
Es traten 5 Roboter zum Wettbewerb an: Deception
(M), ML_Power (M), Fritzi
(A), Kiki (A) und BetterNERF
(A). Die mit (A) markierten Systeme planen die Fahrwege automatisch
im 7000 Byte großen Hauptspeicher, die anderen manuell.
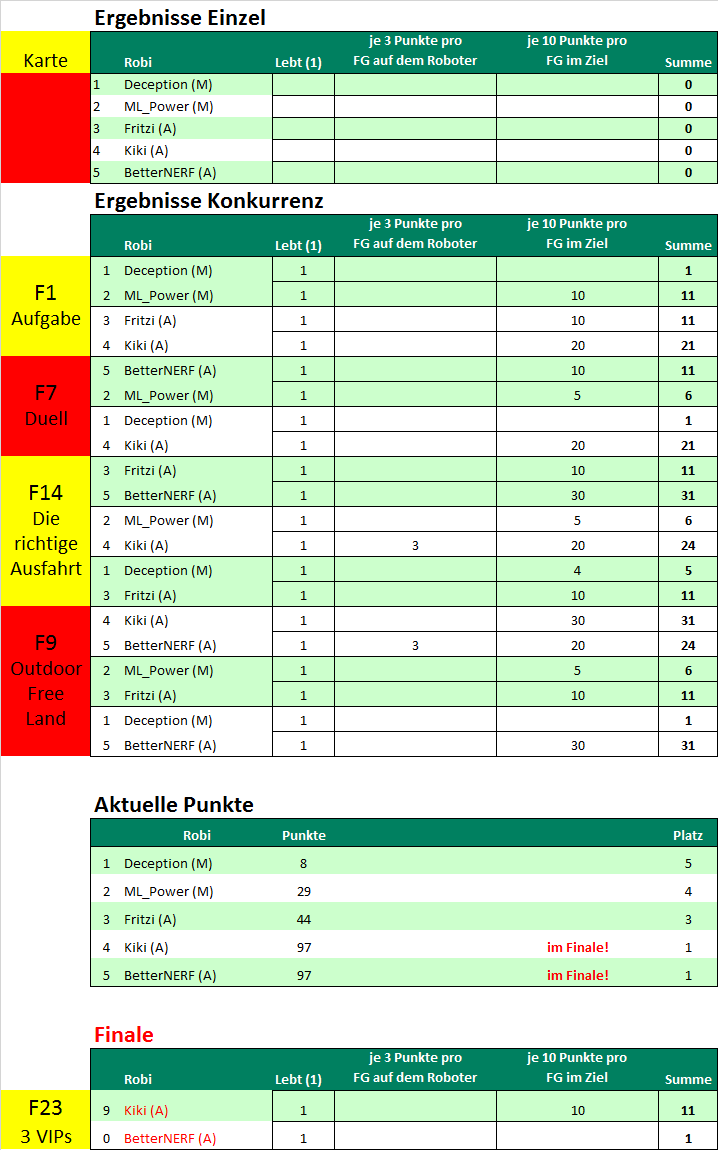
Im Wettbewerb setzten sich die vollautomatischen Systeme deutlich gegen
die teilautomatisierten durch. Die Spitzengruppe bildeten Fritzi mit 44
Punkten sowie Kiki und BetterNerf jeweils mit 97 Punkten. Das Finale
gewann Kiki knapp gegen BettterNerf.
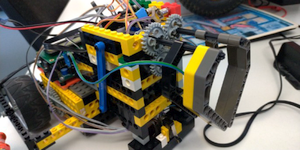
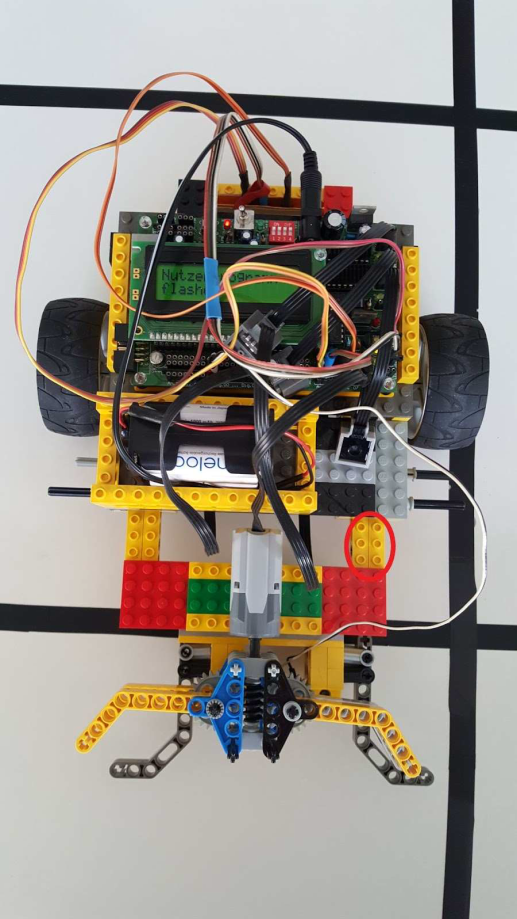
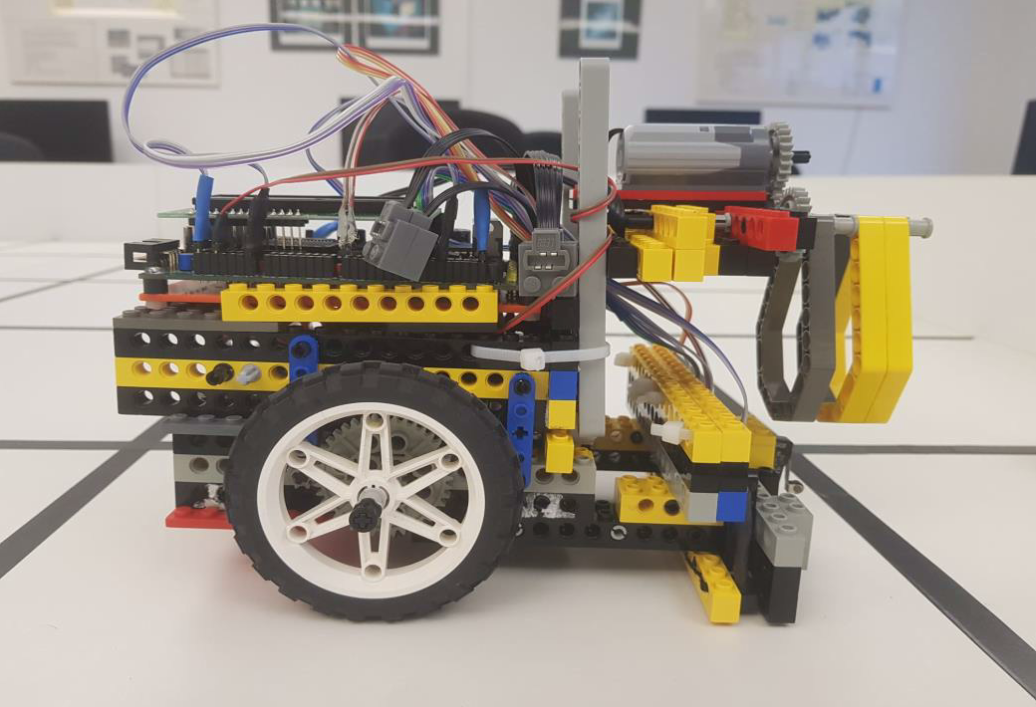
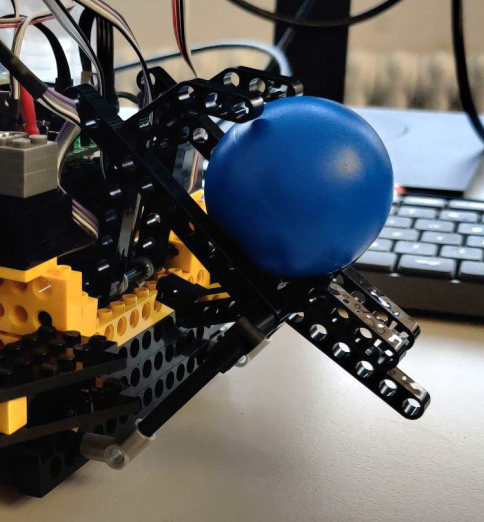
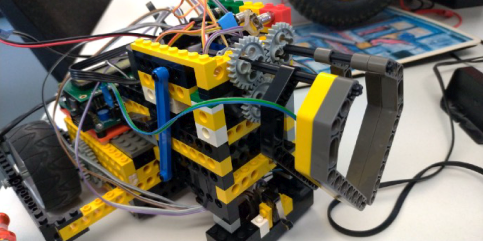
Die Roboter
BetterNerfDeceptionFritziGreifer
FritziGreifer
KikiML_PowerML_Power
vs. DeceptionFritzi
liefertBetterNERF
vs. ML_PowerKiki
liefertFinale
BetterNERF vs. KikiErgebnistabelle