Donnerstag, Februar 24, 2022
Inbetriebnahme des OpenMANIPULATOR-X und Handlungsplanung mit Partial
Order Planning Forward
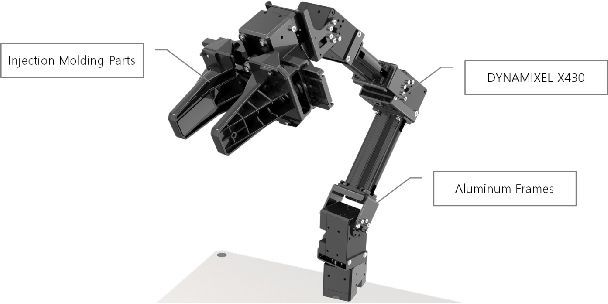
Im Rahmen dieser Bachelorarbeit wird der Greifarm OpenManipulator-X der
Firma ROBOTIS in Betrieb genommen. Der OpenMANIPULATOR-X ist ein
Greifarm der Firma ROBOTIS, der mit dem Robot Operating System 2 (ROS2)
betrieben wird. Für diese Arbeit wird er auf einer stationären
Basisplatte montiert. Alternativ besteht die Möglichkeit ihn auf dem
mobilen Roboter TurtleBot3 WafflePi zu montieren.
Es werden ein Überblick über die grundsätzlichen Vorgänge und Prozesse
bei dessen Nutzung gegeben sowie die Möglichkeiten der Steuerung
erprobt. Weiterhin wird die Steuerung mittels Handlungsplanung
ermöglicht. Hierzu ist der Stand der Forschung auf dem Gebiet der
automatischen Handlungsplanung dargestellt. Als geeignetes
Planungsverfahren wird "Partial Order Planning Forward" implementiert
und einem selbstgewählten Szenario (Blöckewelt) praktisch demonstriert.
Partial Order Planning Forward
mit dem OpenManipulator-X und ROS 2
Kolloqium: 24.02.2022
Betreuer: Prof. Dr.-Ing. Jochen Heinsohn, Dipl.-Inform. Ingo Boersch
Download: A1-Poster,
Abschlussarbeit
Categories: Abschlussarbeiten, AMS-Projekte, Maschinelles Lernen, RobotBuildingLab
Donnerstag, Februar 10, 2022
Umsetzung und Vergleich von GANs (Generative Adversarial Networks) zur
Generierung von Bildern menschlicher Gesichter
Generative Adversarial Networks (GANs) sind ein aktueller Ansatz im
Bereich der Deep Neural Networks. Diese Netzwerke sind in der Lage
anhand von hochdimensionalen Trainingsdaten (speziell Bildern) die
Verteilung der Daten zu erlernen und erfolgreich Generatoren für diese
Verteilung hervorzubringen. Das Ziel dieser Arbeit besteht in der
Auswahl, Implementierung und Evaluation moderner GANs zur Synthese von
Bildern menschlicher Gesichter. Die besondere Schwierigkeit besteht in
der Erschließung und Komplexität der theoretischen Grundlagen, einer
korrekten Implementierung und insbesondere in der Auswahl und Umsetzung
geeigneter Evaluationsverfahrens zur Beurteilung der Güte der
Generatoren.
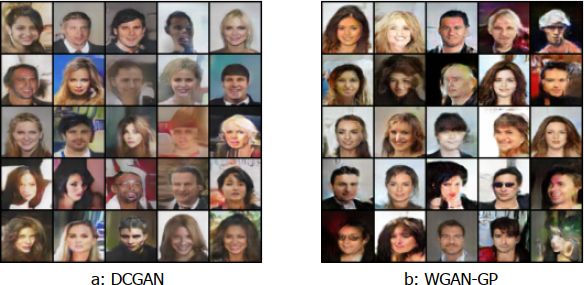
Im Rahmen der Arbeit wurden drei bekannte GAN-Modelle SGAN, DCGAN, und
WGAN-GP implementiert. Die Implementierung erfolgte in der
Programmiersprache Python mit PyTorch. Zur Visualisierung der
Ausgabe-Daten und der Ergebnisse wurde TensorBoard verwendet. Das
Training der GAN-Modelle wurde auf einer NVIDIA Titan RTX Grafikkarte
mit CUDA 11.1 durchgeführt.
Die Qualität der durch SGAN, DCGAN und WGAN-GP generierten Bilder wurde
qualitativ und quantitativ überprüft. Die Fréchet Inception Distance
(FID) Metrik wurde implementiert und für die quantitative Bewertung
verwendet. Die qualitative Evaluierungsmethode erfolgt objektiv und auf
menschlicher Basis. Hierfür wurde das Konzept der Rapid Scene
Categorization-Methode verwendet. Beide Bewertungsmethoden zeigten, dass
das DCGAN-Modell bessere Bilder als WGAN-GP- und SGAN-Modell erzeugt.
Kolloqium: 10.02.2022
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr.-Ing. Jochen Heinsohn
Download: A1-Poster,,
Abschlussarbeit
Categories: Abschlussarbeiten, Maschinelles Lernen
Frameworks zum Management von Data Science-Experimenten
Das Ziel dieser Bachelorarbeit liegt in der Gegenüberstellung von
mindestens zwei Frameworks zum Management von Data Science-Experimenten.
Hierbei ist der Bedarf, die Szenarien, die Einsatzbereiche und
funktionalen Angebote derartiger Frameworks theoretisch zu erarbeiten
und an einem konkreten Beispiel (mindestens Klassifikation mit
Hyperparameteroptimierung) mit Blick auf die Nutzung in einem KMU zu
evaluieren.
Eine wichtige nichtfunktionale Anforderung ist die Verständlichkeit,
Nachvollziehbarkeit und Wiederholbarkeit der Arbeit.
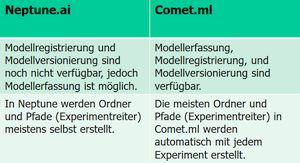
In der Arbeit werden die Frameworks Neptune.ai und Comet.ml
gegenübergestellt. Nach den theoretischen Grundlagen zu MLP, CNN und
Experimentverwaltung, werden die beide Frameworks anhand von
ausgewählten Kriterien verglichen.
Im praktischen Teil der Bachelorarbeit werden Experimente zur Bildklassifizierung mit dem MNIST-Datensatz mit MLP und CNN in beiden Frameworks durchgeführt und verglichen. Die Unterschiede der beiden
Frameworks werden in den Experimenten anhand bestimmter Kriterien wie Versionskontrolle, Abhängigkeitsmanagement, Datenversionierung, Modellversionierung, Modellregistrierung, Artefakten
laden und Proto kollierung von Metadaten untersucht.
Kolloqium: 07.02.2022
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr.-Ing. Jochen Heinsohn
Download: A1-Poster
Categories: Abschlussarbeiten, Maschinelles Lernen