Dienstag, September 28, 2010
 Aufbau der Informationsverarbeitung und Evaluierung eines neuartigen
Sensorsystems zur Positionsbestimmung von kontinuierlich und
quasi-kontinuierlich gearteten Roboterkinematiken
Aufbau der Informationsverarbeitung und Evaluierung eines neuartigen
Sensorsystems zur Positionsbestimmung von kontinuierlich und
quasi-kontinuierlich gearteten Roboterkinematiken
Ziel der Arbeit ist eine Applikationsentwicklung für ein verteiltes
Sensorsystem.
Hierzu ist Kommunikation zwischen Mikrocontroller und Sensoren über I2C
und zum PC über CAN-Bus zu entwerfen und umzusetzen. Weiterhin soll eine
Vorverarbeitung der Messwerte im Mikrocontroller (Nullpunktabgleich)
sowie auf dem PC zur Positionsberechnung entwickelt werden. Die Funktion
des Systems soll durch geeignete Tests nachgewiesen werden.
Kolloquium: 28.09.2010
Betreuer: Dipl.-Inform. Ingo Boersch, Dipl.-Ing. Roland Behrens
(Fraunhofer-Institut für Fabrikbetrieb und -automatisierung IFF)
Download: A1-Poster
Categories: Abschlussarbeiten, AMS-Projekte
Freitag, September 03, 2010
An fünf Tagen vom 13. bis zum 17. September 2010 bauten 13 Schüler des
Leistungskurses Informatik der 13. Klassen des von-Saldern-Gymnasiums im
KI-Labor autonome Roboter. Die Woche endete mit dem Abschlusswettbewerb
am Freitag, 17. September, 13 Uhr im KI-Labor (Raum 130 im
Informatikzentrum).
Thema: Das
Kværner-Verfahren
Download: Plakat
Die Roboter basieren auf dem AKSEN-Board und müssen zum Lösen der
Aufgabe ein robustes Getriebe, Sensoren zum Erkennen des Startsignals,
der Linien und Kreuzungen aufweisen. Das auch die strukturierte
Programmierung eine wesentliche Rolle spielt, war sicher eine Erkenntnis
der Woche. Folgende Roboter traten an:
-
Alpha-Bot
-
Predator 13
-
Robozicke
-
Optimus Prime
-
PaMaMa
Im Wettbewerb hatte der Favorit Optimus Prime Probleme beim
Linienfolgen und konnte die hervorragende Leistung der vorangegangenen
Tage nicht stabil wiederholen. Auch Robozicke wollte mit dem Kopf
durch die Wand, obwohl sie im Vorfeld schon das Labyrinth gemeistert
hat. Predator 13 fuhr besser als erwartet, die Spitze übernahmen
in den Vorrunden PaMAMa und Alpha-Bot mit zuverlässigen Fahrten und
Kollisionen. Im Finale erreichte Alpha-Bot den Punkt C um wenige
Sekunden früher und wurde so von PaMAMa nur wenig getroffen. Alpha-Bot
erreichte und blockierte somit Punkt D (Beweisfoto).
Ergebnisse: Punkte
(pdf) und Fotos
von R. Zimmermann
Categories: AKSEN, AMS-Projekte, RobotBuildingLab
Mittwoch, September 01, 2010
Mittwoch, September 01, 2010
Bei dem Pioneer 2/3 handelt es sich um eine neue Generation
intelligenter mobiler Roboter, die von der US-Firma MobileRobots
(ehemals ActivMedia) produziert werden. Bereits das Vorgängersystem
Pioneer 1 hat sich international bewährt und wird auch an vielen
deutschen Hochschulen in Lehre und Forschung eingesetzt (u.a. Uni
Freiburg, TU München, FH + Uni Hamburg, etc.).
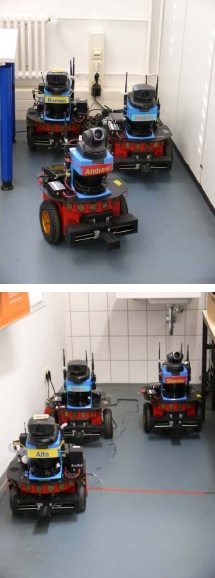
An der FH Brandenburg wurden
-
1999 2 x Pioneer II CE im Rahmen eines Forschungsprojekts (Alfa und
Romeo)
-
2003 2 x Pioneer 3-DX/2-DX8 und (Marvin und Sunny)
-
2008 2 x Pioneer 3-DX (Stanley und Andrew)
beschafft. 2008 wurden die Roboter mit Laserscannern, onboard-PCs, WLAN
und 5.8 GHz Video aufgerüstet. Die Roboter werden im Hauptstudium in der
Veranstaltung "Autonome Mobile Systeme", sowie in Projekten und
Abschlussarbeiten eingesetzt.
Die aktuelle Konfiguration beinhaltet:
-
Asus Eee PC 1000H, 1.6GHz, 160GB HDD, 2GB RAM, Win7
-
EVI-D31-Kamera bzw. EVI-D100P (Pan, Tilt und Zoom)
-
DFG/USB2-lt Framegrabber
-
8 Sonarsensoren vorn
-
Odometriesensorik
-
elektronischer Kompaß V2X (nur P2)
-
Elektromechanischer Greife
-
Laser Scanner Sick LMS 200
-
diverse Funkverbindungen
PCs mit
-
ARIA (MobileEyes, MobileSim, ARIA-Entwicklungssystem und
Klassenbibliotheken)
-
Video-Empfänger
-
Dokumentation, Visual Studio, OpenCV, …
Das System wird remote vom PC gesteuert oder onboard. Seit dem WS09/10
sind die Roboter in das WLAN-Netz der FH eingebunden und können so
beliebig zugegriffen werden. Gleichzeitig wurde die Steuerung über
serielle Funkverbindungen (Bluetooth Parani SD) stillgelegt, da das
Funkband überlastet ist.
Wir haben nun die Zielkonfiguration eines autonomen Betriebs erreicht,
bei dem die Funkverbindung nur zur Aufgabenvergabe und zum Monitoring
genutzt wird.
Categories: RobotBuildingLab
