
Hindernisumfahrung eines autonomen Roboters in einer unbekannten
statischen Umgebung
Ziel dieser Arbeit ist die Darstellung und der Vergleich verschiedener
Hindernisumfahrungsstrategien, sowie die Konzeption und Implementierung
einer Kollisionsvermeidungs- und Hindernissumfahrungsstrategie für den
Wachschutzroboter Mosro.
Da der Roboter den Überwachungsweg in einer statischen Umgebung
zurücklegt, können dynamische Objekte bei der Umfahrung vernachlässigt
werden. Die Hindernisumfahrung soll möglichst einfach und in der Praxis
einsetzbar sein, dabei aber die bauartbedingten Eigenschaften des
Roboters berücksichtigen.
Abgabe: 07.03.2005 Kolloqium: 30.03.2005
Betreuer: Prof. Dr. sc. techn. Harald Loose, Dr. Jens Hanke, Robowatch
Technologies
Download: A1-Poster
Vortrag
Categories: Abschlussarbeiten, RobotBuildingLab
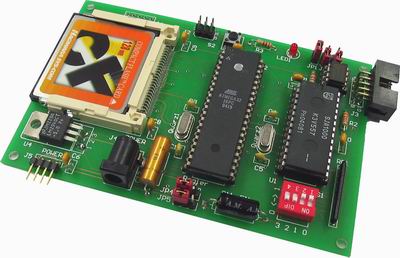 Das CompactFlash - Speichermodul (kurz CF-Modul) ist Teil des RCUBE
Systems. Es bietet die Möglichkeit, im autonomen Betrieb größere
Datenmengen auf einem FAT16-Dateisystem der CompactFlash-Karte zu
speichern bzw. zu lesen. Damit können Sensor-, Lern- oder andere Daten
über einen Stromausfall hinweg erhalten werden. Die Daten der CF-Karte
lassen sich in einem üblichen Kartenlesegerät in den PC einlesen.
Das CompactFlash - Speichermodul (kurz CF-Modul) ist Teil des RCUBE
Systems. Es bietet die Möglichkeit, im autonomen Betrieb größere
Datenmengen auf einem FAT16-Dateisystem der CompactFlash-Karte zu
speichern bzw. zu lesen. Damit können Sensor-, Lern- oder andere Daten
über einen Stromausfall hinweg erhalten werden. Die Daten der CF-Karte
lassen sich in einem üblichen Kartenlesegerät in den PC einlesen.
Die Verbindung mit den anderen Boards erfolgt über den CAN-Bus. Andere
Boards des Systems können so über CAN-Pakete Daten lesen oder schreiben.
Nutzerhandbuch CF-Modul
Categories: AKSEN, RobotBuildingLab
Maschinelles Lernen am Laufroboter ELFE - KI-Projekt WS 2004/2005

Zusammenfassung
Es ist ein schnelles Bewegungsmuster für den elfbeinigen Roboter ELFE zu
erzeugen, dazu sind verschiedene aus der Vorlesung bekannte Verfahren
einzusetzen.
Projektziel
Der elfbeinige Roboter ELFE wurde konstruiert, um eine definierte
Morphologie beim Testen der automatischen Erstellung von Bewegungsmustern
einsetzen zu können. Insbesondere verbietet der Roboter vermutlich die
manuelle Erstellung eines exzellenten Bewegungsmusters und zwingt so zu
automatischen Verfahren.
Ziel des Projektes ist die Anlage einer
Bibliothek ladbarer Bewegungsmuster für diesen Roboter, insbesondere zur
schnellen Fortbewegung. Es ist weiter zu prüfen, ob erfolgreiche Muster
durch Rotation für andere Richtungen der Bewegung anwendbar sind. Dabei
sollen verschiedene Ansätze zum Einsatz kommen, ein Extrem wäre z.B. die
manuelle Erzeugung eines Musters. Voraussetzung für den Vergleich ist eine
Testumgebung aus Hard- und Software, die im ersten
Projektabschnitt
erstellt wird.
komplette
Aufgabenstellung
Ergebnisse

Der Umfang des Versuchsaufbaus war für ein Projekt zu groß, so dass als
wesentliches Projektergebnis der Versuchsaufbau in Hard- und Software
realisiert wurde. Es können damit automatisch Individuen im
Evolutionsprozess erzeugt und auf der ELFE evaluiert werden.
Dokumentation
der LösungA1-Poster
der ProjektgruppeKurzvortrag
zur Mitte des ProjektesFilm
eines handcodierten Bewegungsmusters (10 MB)
Programm
und Quellen (für Visual-C 6.0, AKSEN-Bibiliothek 0.965)
Categories: AKSEN, AMS-Projekte, Maschinelles Lernen, RobotBuildingLab